© Jérôme CHATIN/CNRS Images
Référence
20030001_1431
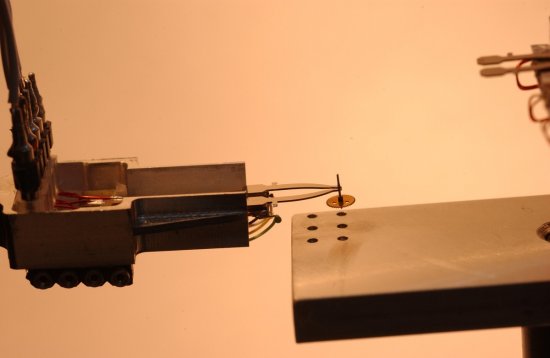
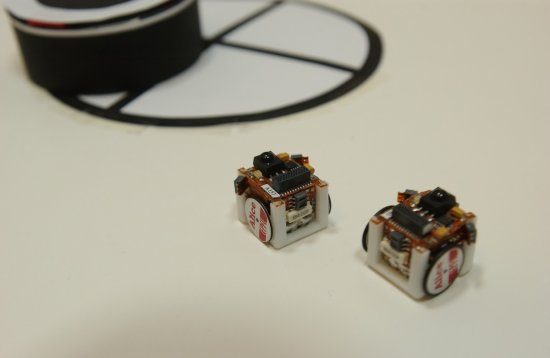
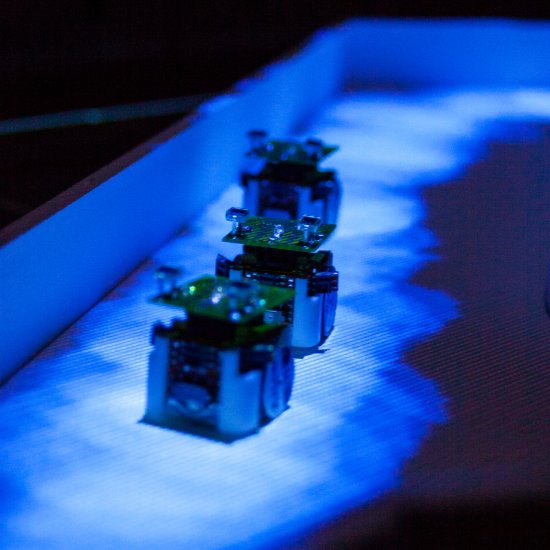
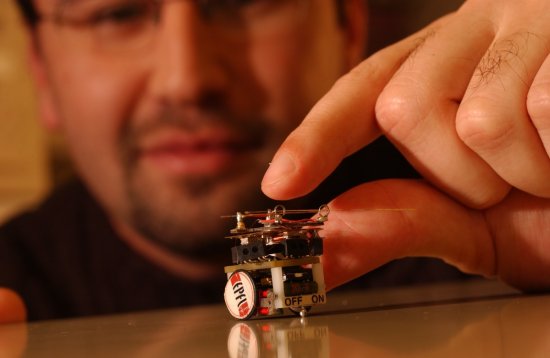
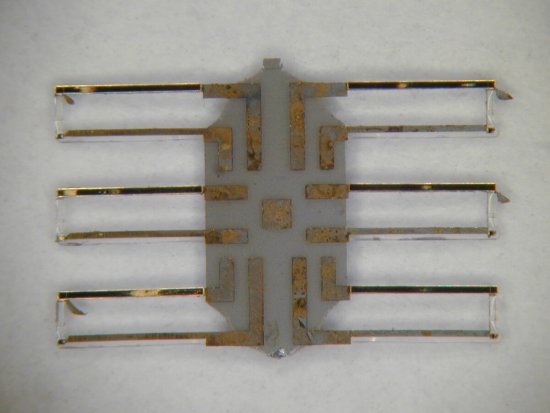
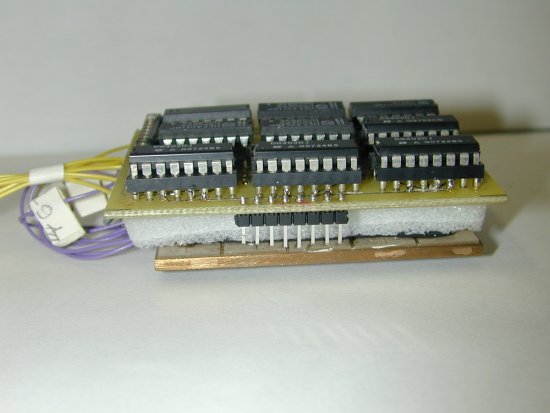
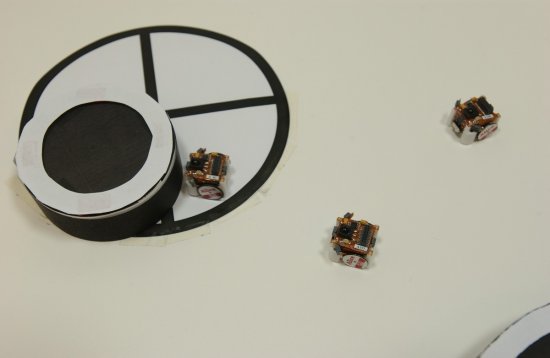
Développement de capteurs tactiles pour la communication antennaire entre des mini-robots et des bla
Développement de capteurs tactiles pour la communication antennaire entre des mini-robots et des blattes. Ces capteurs sont implantés sur des mini-robots ALICE développés à l'EPFL (Suisse). Etude des capteurs et de l'électronique embarquée. Développement d'une architecture de commande sur les microcontrôleurs du robot.
Ajouter à ma sélection
Conditions d'utilisation
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales