© Jérôme CHATIN/CNRS Images
Référence
20030001_1435
Développement d'une architecture de contrôle hiérarchique et réactive pour le transport coopératif d
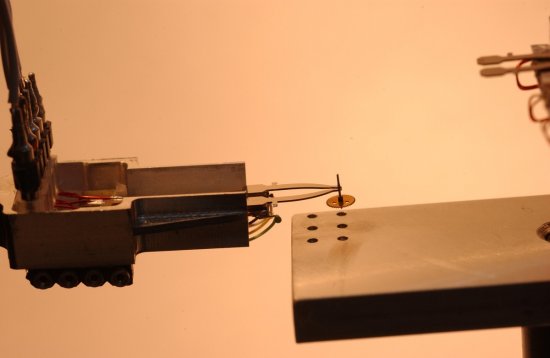
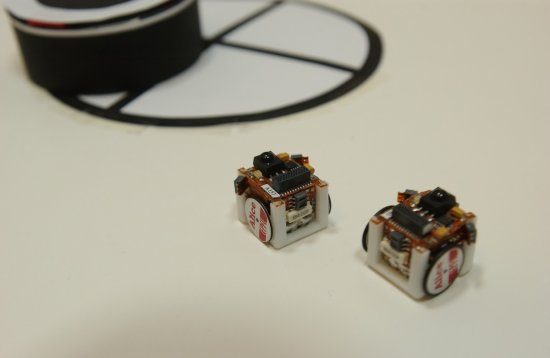
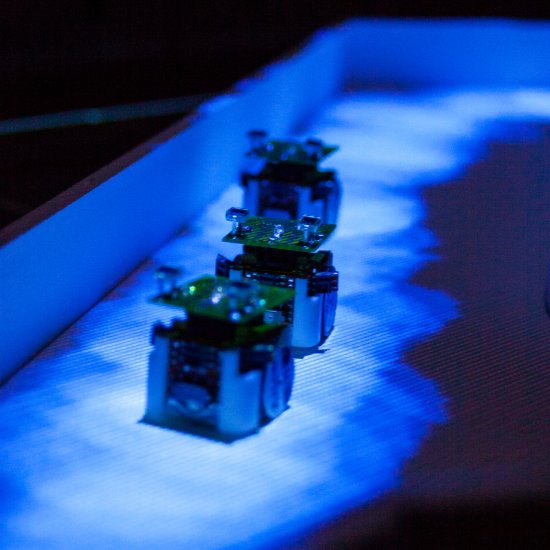
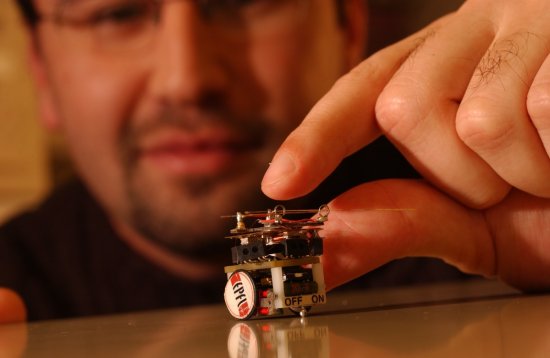
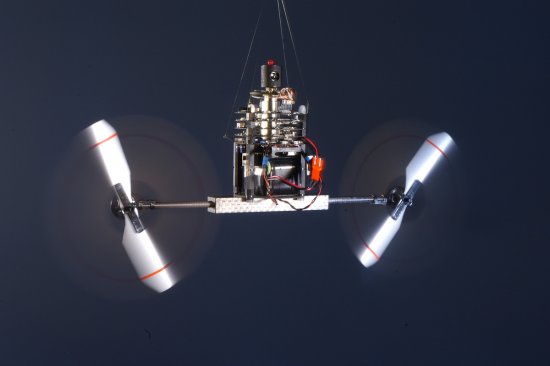
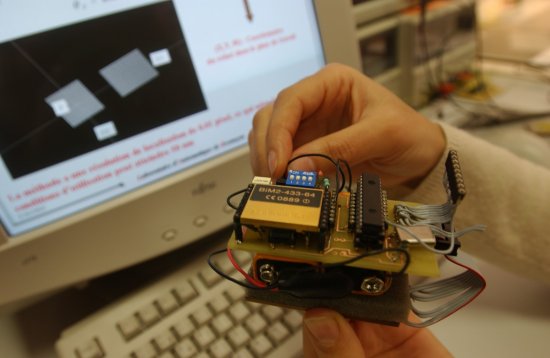
Développement d'une architecture de contrôle hiérarchique et réactive pour le transport coopératif d'objets. L'objectif est de faire réaliser des tâches complexes par un groupe de mini-robots, chacun exécutant uniquement des tâches élémentaires (évitement d'obstacles, attraction vers une source de lumière,...). La tâche complexe étudiée ici, concerne la poussée et le positionnement d'un objet lourd sur une cible placée dans l'environnement en utilisant la coopération de plusieurs mini-robots.
Ajouter à ma sélection
Conditions d'utilisation
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales