© Jérôme CHATIN/CNRS Images
Référence
20030001_1438
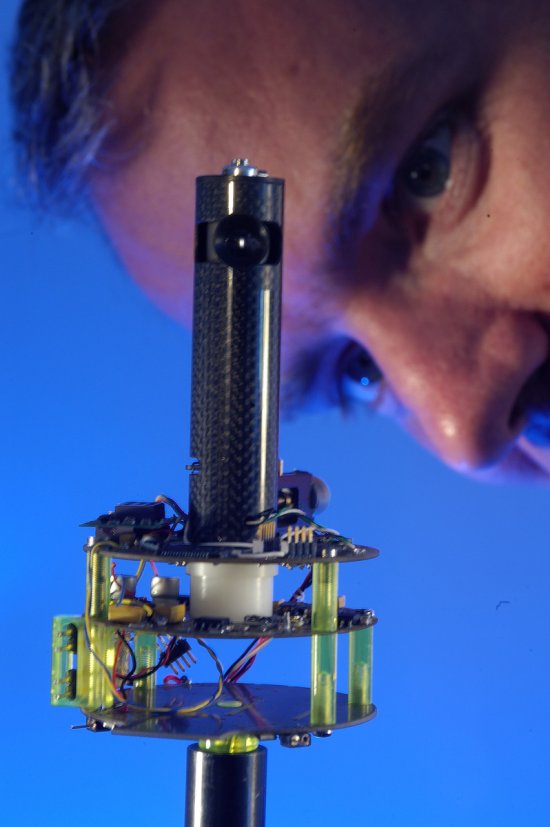
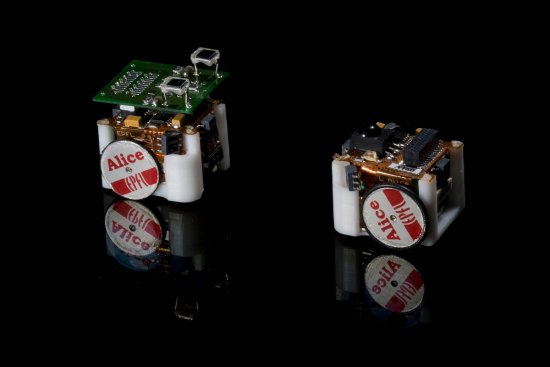
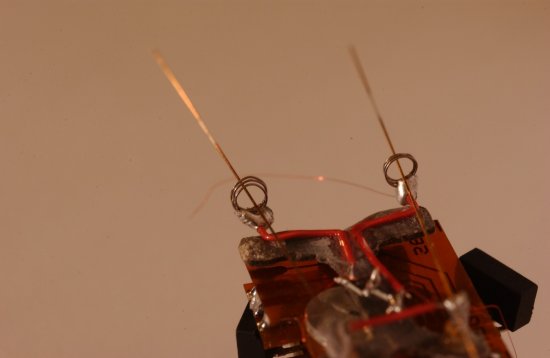
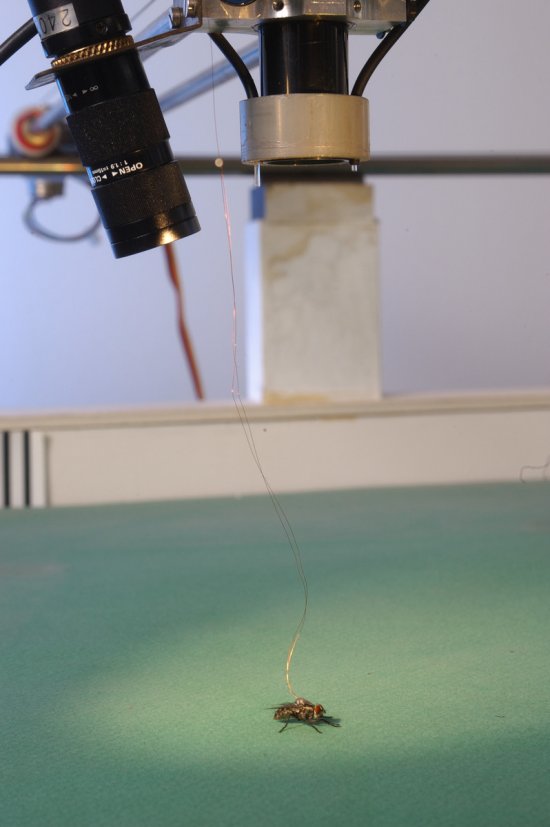
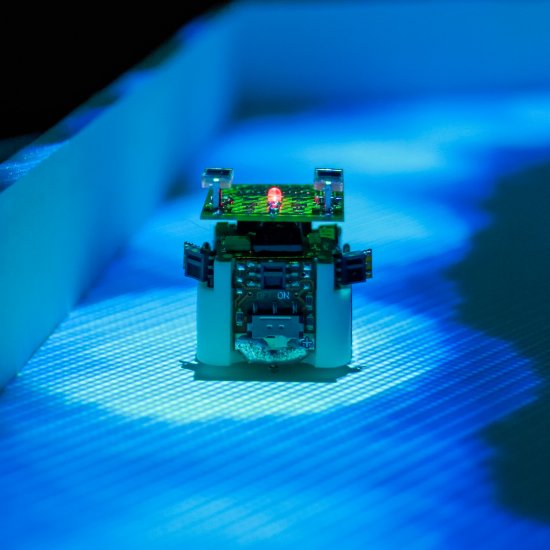
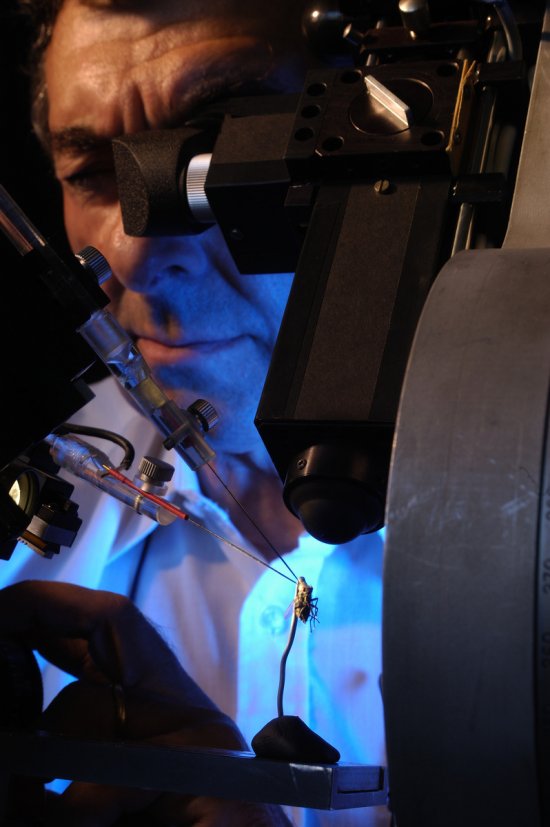
Prototype de micro-robot mobile non autonome se déplaçant dans un tuyau de 10 mm de diamètre intérie
Prototype de micro-robot mobile non autonome se déplaçant dans un tuyau de 10 mm de diamètre intérieur. Son principe de locomotion, de type " inch worm ", imite celui du lombric. Il comporte deux groupes de trois pattes actionnés par des fils en alliage à mémoire de forme (AMF) et permettant le blocage contre la paroi interne du tuyau. Le mouvement d'extension/contraction de son corps est actionné par un ressort en AMF. Ce type de robot peut permettre d'inspecter des canalisations de petit diamètre.
Ajouter à ma sélection
Conditions d'utilisation
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales