© Jérôme CHATIN/CNRS Images
Reference
20030001_1438
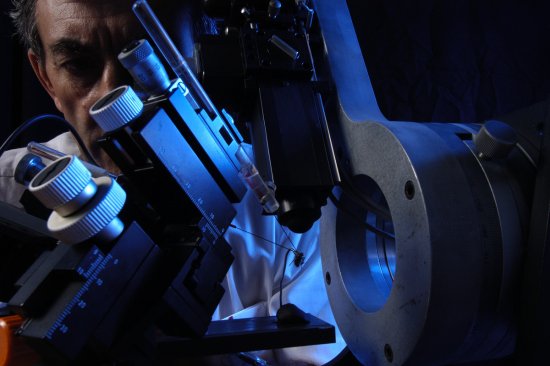
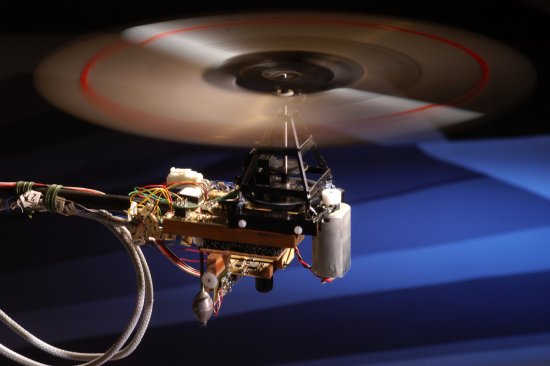
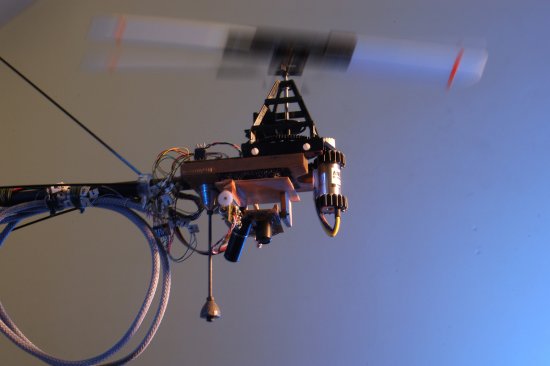
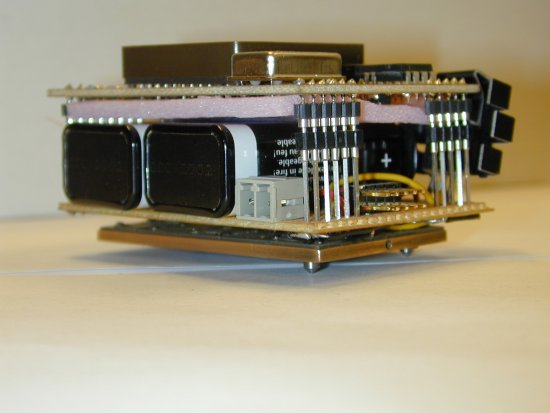
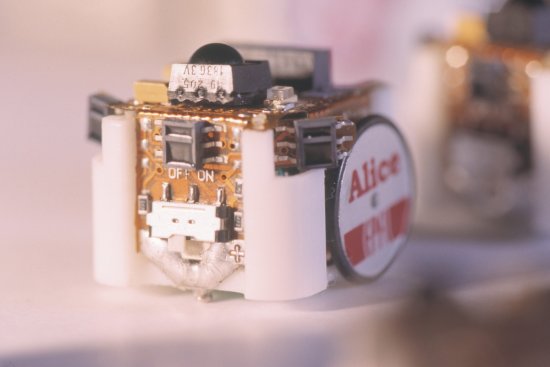
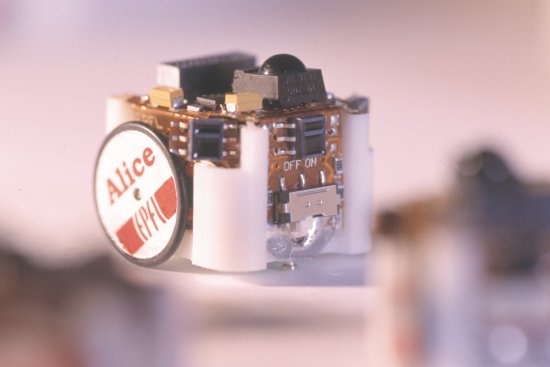
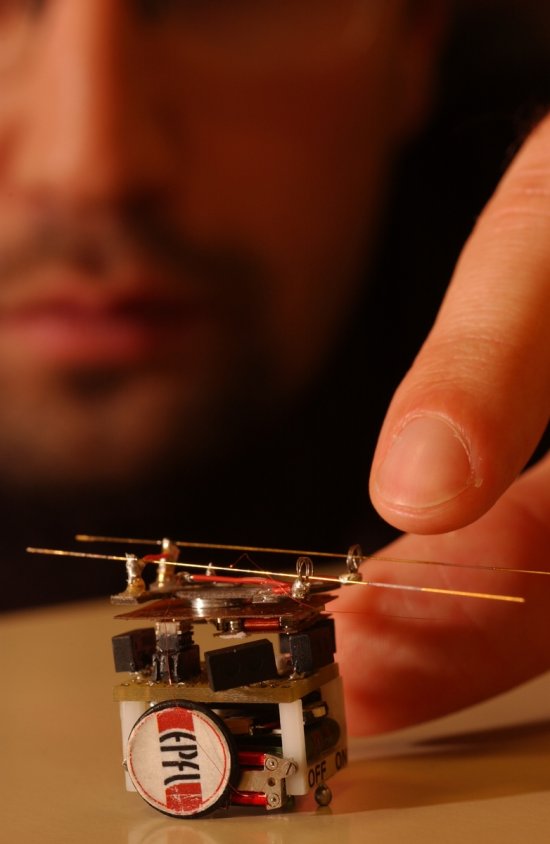
Prototype de micro-robot mobile non autonome se déplaçant dans un tuyau de 10 mm de diamètre intérie
Prototype de micro-robot mobile non autonome se déplaçant dans un tuyau de 10 mm de diamètre intérieur. Son principe de locomotion, de type " inch worm ", imite celui du lombric. Il comporte deux groupes de trois pattes actionnés par des fils en alliage à mémoire de forme (AMF) et permettant le blocage contre la paroi interne du tuyau. Le mouvement d'extension/contraction de son corps est actionné par un ressort en AMF. Ce type de robot peut permettre d'inspecter des canalisations de petit diamètre.
Add to my selection
Terms of use
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions