© Jérôme CHATIN/CNRS Images
Référence
20030001_1440
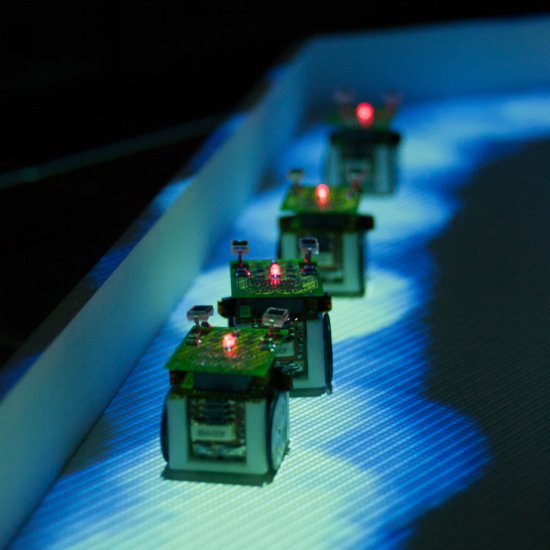
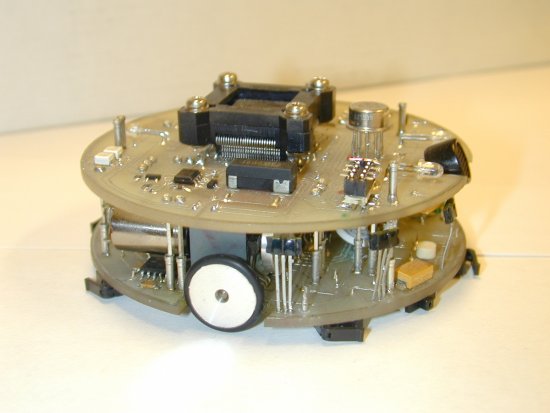
Ce mini-robot MESSOR à roues se présentent sous la forme de 3 étages de 80 mm de diamètre, sur lesqu
Ce mini-robot MESSOR à roues se présentent sous la forme de 3 étages de 80 mm de diamètre, sur lesquels sont regroupées les fonctions commande, locomotion, perception, communication et l'énergie. La partie commande est architecturée autour d'un microcontrôleur HITACHI intégrant une architecture multitâche basée sur le noyau temps réel Real Time Craft. La perception de l'environnement est effectuée grâce à une ceinture de capteurs (ultrasons, infrarouges, contacts) intégrée sur les mini-robots. Ils sont réalisés en coopération avec d'autres mini-robots pour des taches complexes.
Ajouter à ma sélection
Conditions d'utilisation
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales