© LIRMM/CNRS Images
Référence
20030001_0900
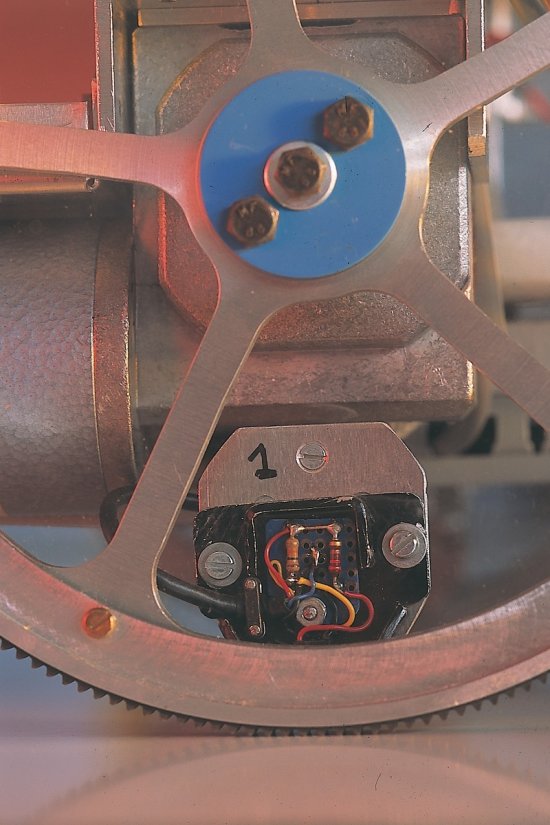
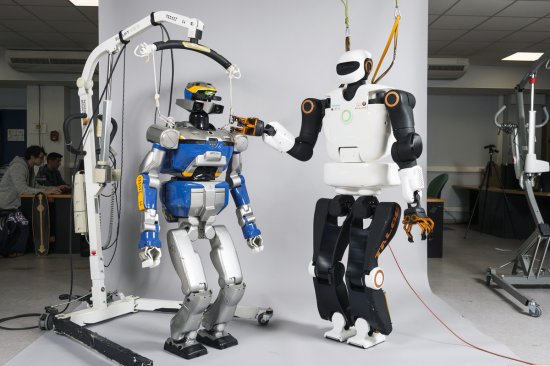
Robot H4 : Robot manipulateur parallèle rapide dédié aux tâches de pick-and-place. Le concept d'ampl
Robot H4 : Robot manipulateur parallèle rapide dédié aux tâches de pick-and-place. Le concept d'amplification des mouvements au niveau de la plate-forme mobile est appliqué ici pour obtenir une rotation de 360° autour de l'axe vertical. L'organe terminal de ce robot est équipé d'un dispostif de mesure additionnel permettant d'améliorer la précision totale du robot.
Ajouter à ma sélection
Conditions d'utilisation
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales