© TIMC/CNRS Images
Référence
20030001_0765
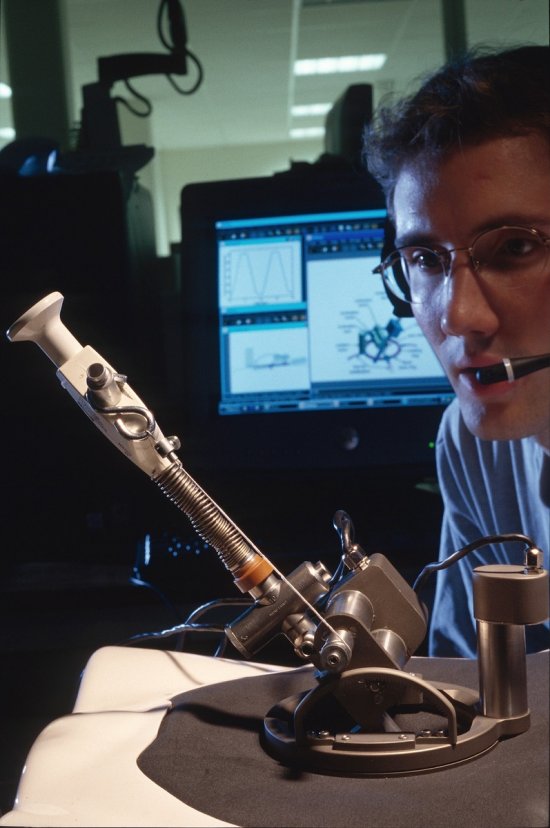
Prototype d'un robot RSP (à sécurité passive) 6 axes, en cours d'évaluation. Ce type de robot a pour
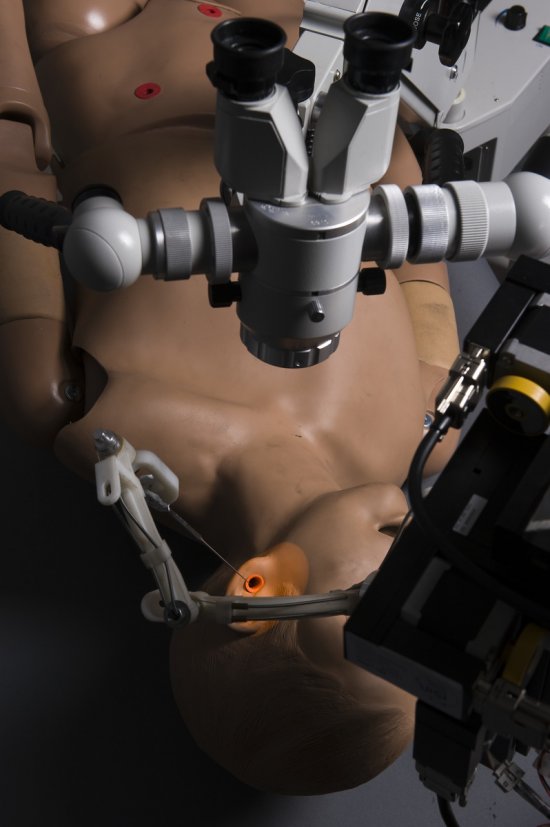
Prototype d'un robot RSP (à sécurité passive) 6 axes, en cours d'évaluation. Ce type de robot a pour objectif l'assistance chirurgicale robotisée et particulièrement l'aide à la réalisation du geste final. Le rôle du robot consiste à autoriser les commandes de l'opérateur en vérifiant qu'elles ne transgressent pas les règles établies lors de la planification de l'opération. Le robot n'effectue aucun mouvement mais empêche l'opérateur de faire des erreurs qui en chirurgie pourraient s'avérer préjudiciables à la qualité du geste. Les contraintes du geste du chirurgien sont dynamiques et programmables.
Ajouter à ma sélection
Conditions d'utilisation
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales