© TIMC/CNRS Images
Reference
20030001_0765
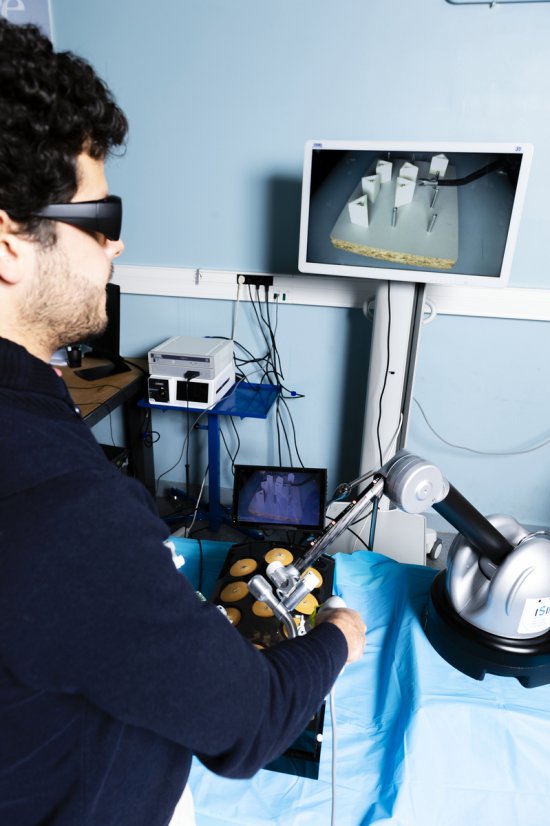
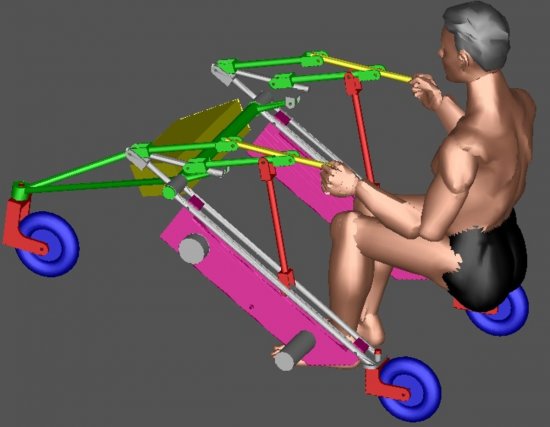
Prototype d'un robot RSP (à sécurité passive) 6 axes, en cours d'évaluation. Ce type de robot a pour
Prototype d'un robot RSP (à sécurité passive) 6 axes, en cours d'évaluation. Ce type de robot a pour objectif l'assistance chirurgicale robotisée et particulièrement l'aide à la réalisation du geste final. Le rôle du robot consiste à autoriser les commandes de l'opérateur en vérifiant qu'elles ne transgressent pas les règles établies lors de la planification de l'opération. Le robot n'effectue aucun mouvement mais empêche l'opérateur de faire des erreurs qui en chirurgie pourraient s'avérer préjudiciables à la qualité du geste. Les contraintes du geste du chirurgien sont dynamiques et programmables.
Add to my selection
Terms of use
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions