Programme(s)
Année de production
2002

© Richard LAMOUREUX/INRIA/CNRS Images
20020001_1374
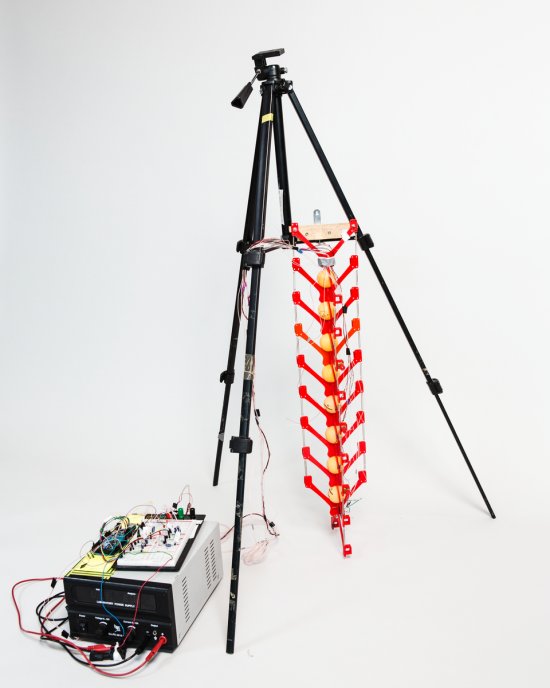
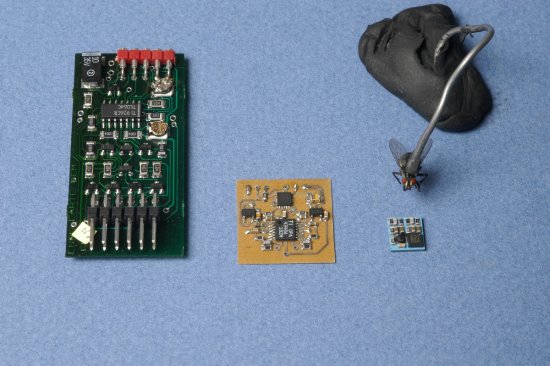
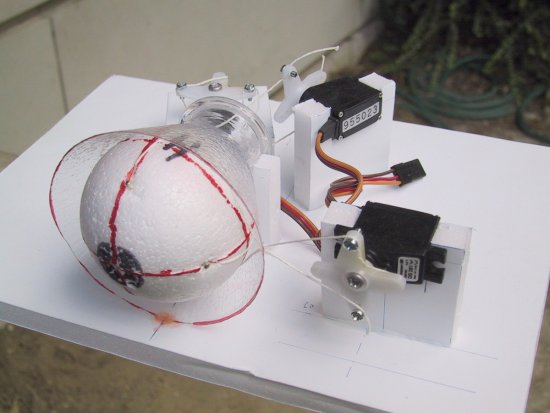
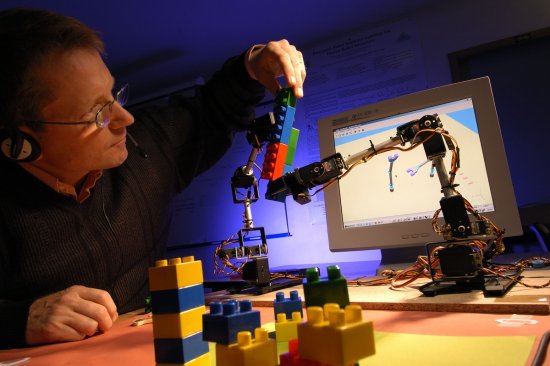
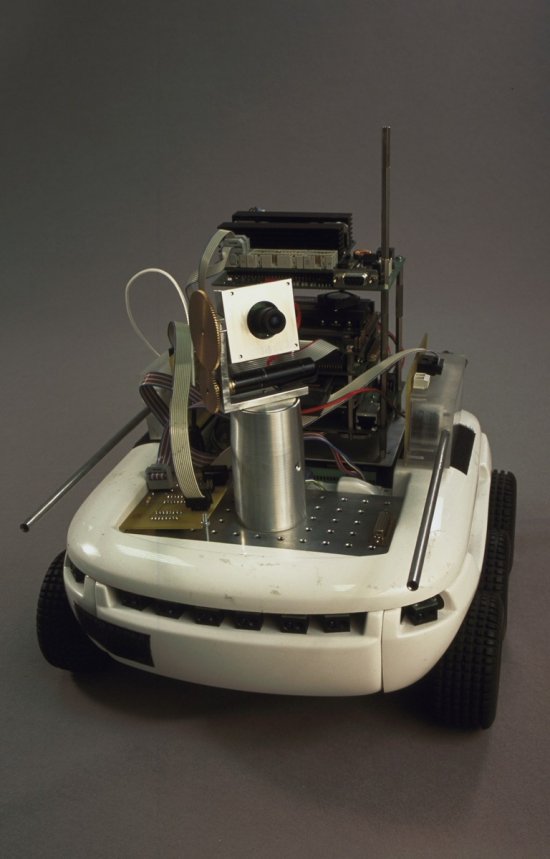
Plateforme expérimentale de perception olfactive, Koala. Il s'agit d'élaborer un robot qui détecte les odeurs pour identifier des produits à risques : fuite de gaz ou présence de produits dangereux dans des espaces publics ou dans des environnements hostiles (champ de mines, environnement radioactif). Grâce à ses deux capteurs qui le dotent d'une "stéréoolfaction" (les 2 tubes horizontaux) et à un modèle de réseaux de neurones impulsionnels d'inspiration biologique, le robot sait se diriger vers le lieu d'émission d'une odeur. D'autres structures neuronales lui permettant d'identifier les odeurs sont en développement. La photo montre une expérience menée par l'équipe où le robot dévie effectivement sa trajectoire pour se diriger vers une source olfactive placée devant un ventilateur (fumée). INRIA. Collaboration avec l'Université Henri Poincaré, Nancy 1 et l'Institut des Sciences Cognitives de Lyon.
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales
2002
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.