Research program(s)
Production year
2012

© Cyril FRESILLON/CNRS Images
20120001_0753
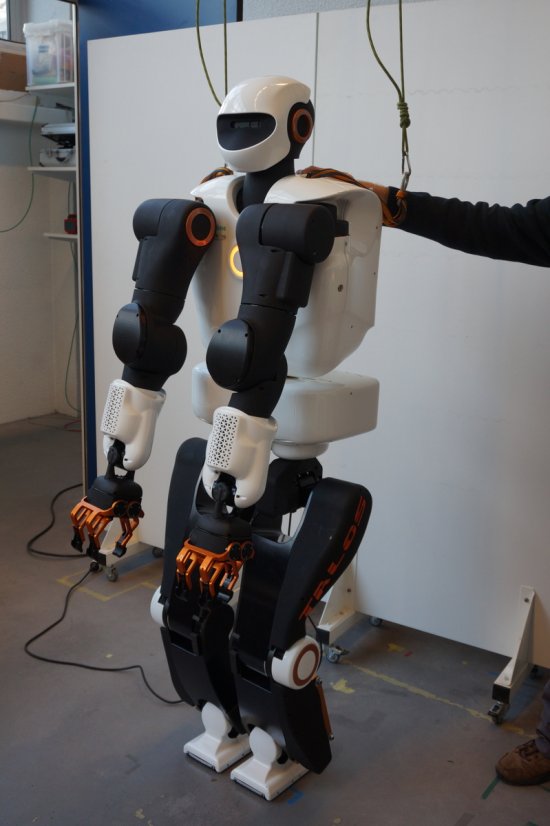
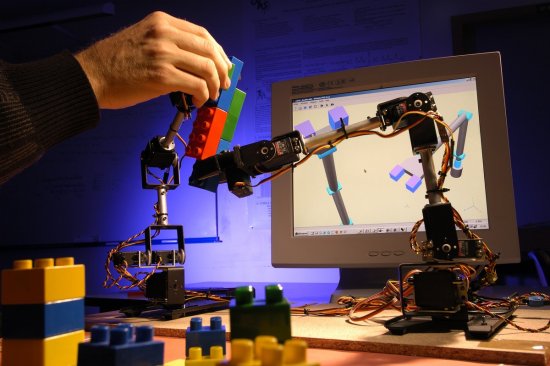
Planification et contrôle d'une tâche de recherche et livraison d'un objet à une personne, dans un environnement domestique. Cette expérience utilise le robot PR2 qui se déplacera dans le séjour et la chambre à coucher de l'appartement. Elle illustre la capacité du robot à détecter la position et la posture de la personne, puis de planifier le lieu où la tâche peut être réalisée. Ainsi, le robot planifie pour lui-même mais aussi pour l'homme. L'expérience montre également la capacité du robot à identifier, localiser et manipuler des objets (choix de prise, mouvement sans collision en environnement contraint). Cette recherche en robotique est menée dans le bâtiment Adream, Architectures dynamiques reconfigurables pour systèmes embarqués autonomes mobiles.
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions
2012
Our work is guided by the way scientists question the world around them and we translate their research into images to help people to understand the world better and to awaken their curiosity and wonderment.