Production year
2020

© Cyril FRÉSILLON / ISIR / CNRS Images
20200028_0013
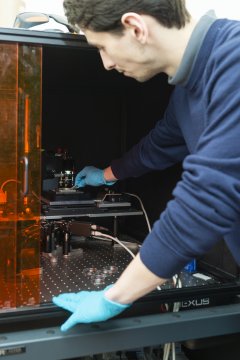
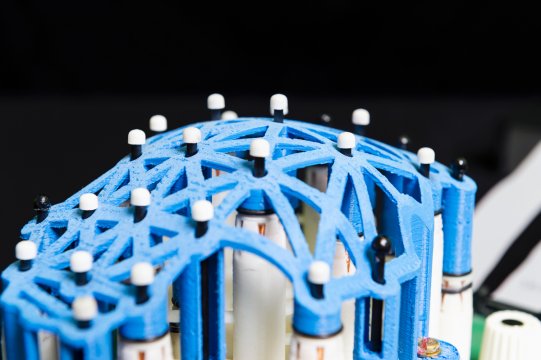
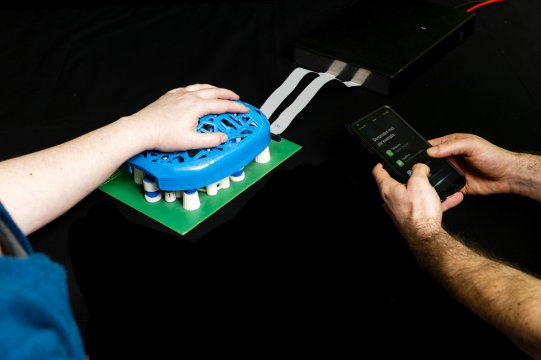
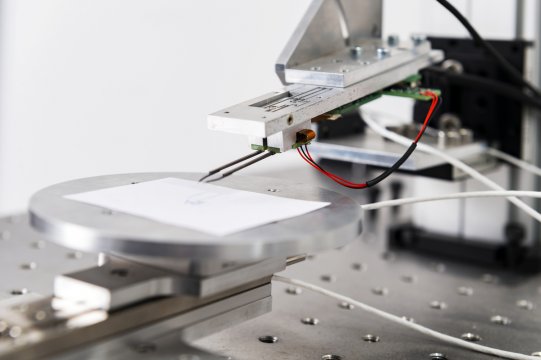
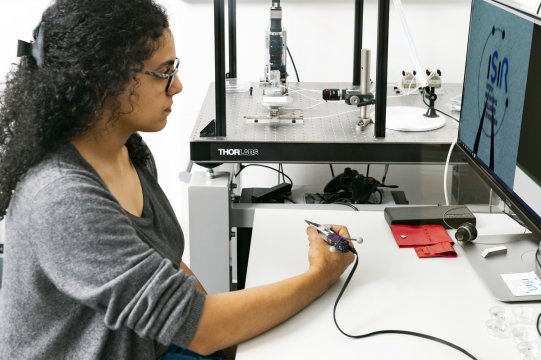
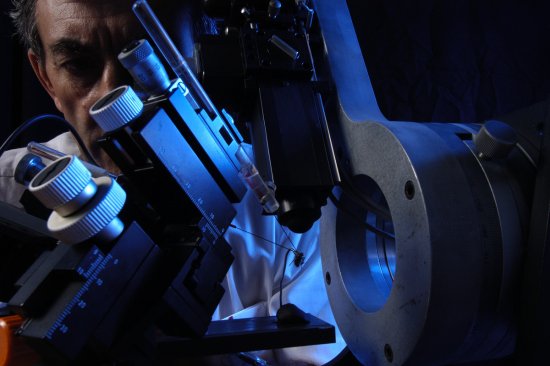
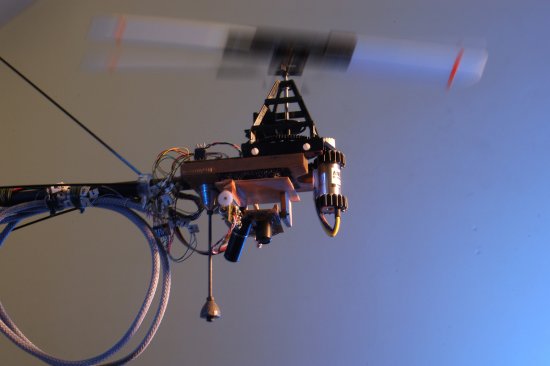
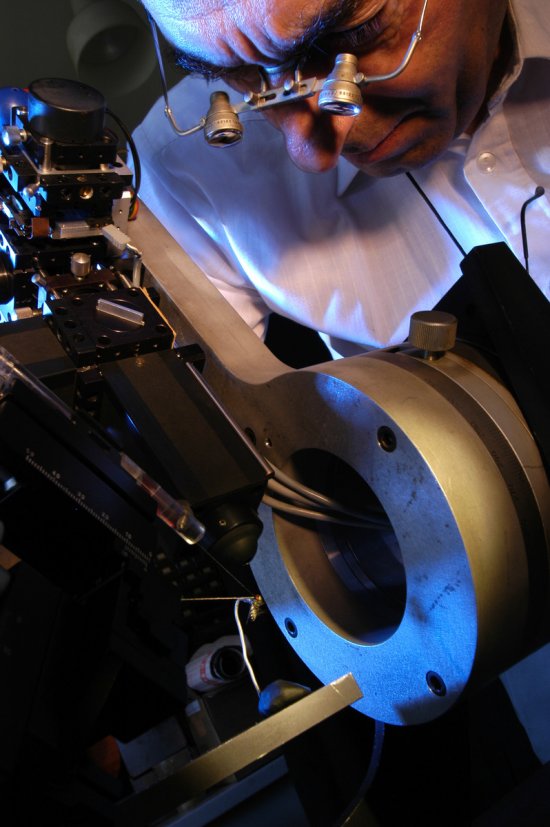
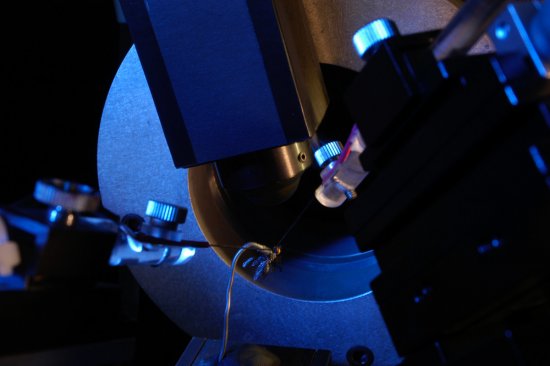
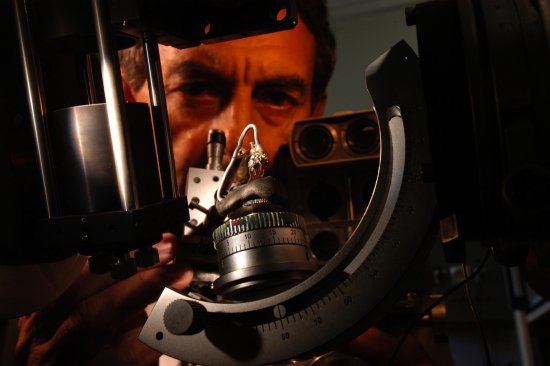
Manipulation d’une cellule à l’aide d’un microrobot sur une station de pinces optiques. Ce dispositif permet de manipuler des objets de taille micrométrique sans contact, grâce à la force résultant de la réfraction d’un faisceau laser. C’est le principe du piège optique. La télé-opération est utilisée pour des échantillons biologiques devant être confinés (cellules cancéreuses, bactéries, parasites, etc.). A l’écran, un microrobot sert d’intermédiaire : il est contrôlé via les pinces optiques pour manipuler une cellule. On évite ainsi le contact direct avec le laser infrarouge, délétère pour le matériel biologique. Le manipulateur permet également un retour de force, grâce à l’utilisation d’une caméra événementielle (de capture de mouvement). Cette interface haptique est développée par l’Institut des systèmes intelligents et de robotique (ISIR), en collaboration avec l’Institut de la vision.
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions
2020
Our work is guided by the way scientists question the world around them and we translate their research into images to help people to understand the world better and to awaken their curiosity and wonderment.