Année de production
2017

© Jean-Claude MOSCHETTI / HEUDIASYC / CNRS Images
20170123_0027
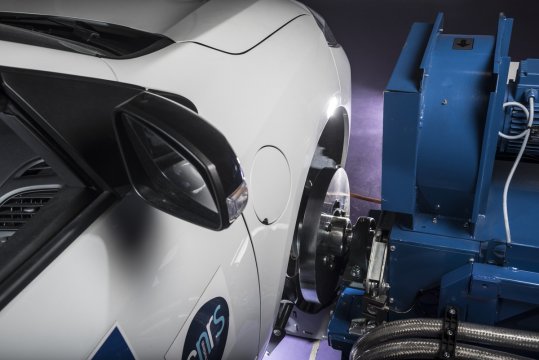
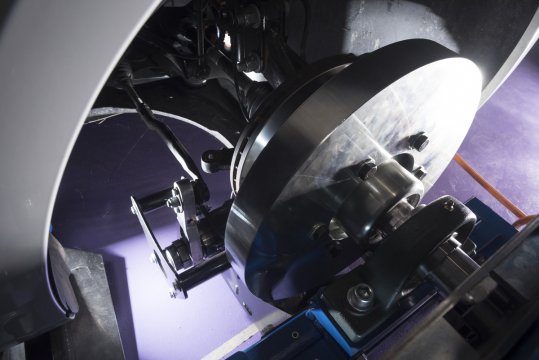
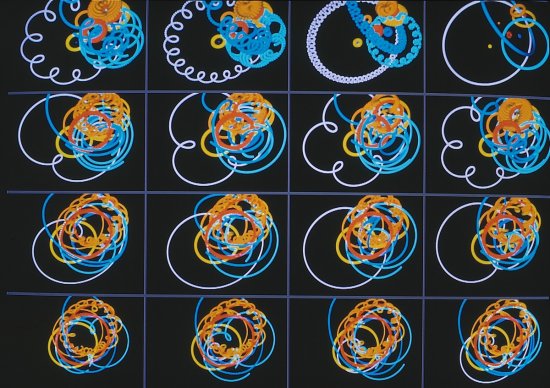
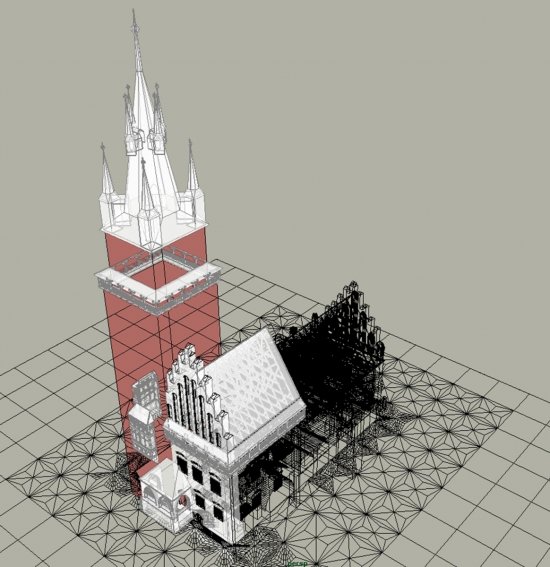
Banc de contrôle permettant de superviser la conduite d'une voiture autonome sur banc VILAD ("Vehicle in the Loop for Autonomous Driving"). Le logiciel Scanner studio (Oktal) reproduit la dynamique du véhicule et fournit les données des capteurs. Le banc VILAD, conçu sur mesure par les chercheurs du laboratoire Heudiasyc, permet de tester des algorithmes de conduite en toute sécurité et en conditions semi-réelles sur des véhicules robots et autonomes. Le banc est composé d'un moteur électrique relié à la crémaillère agissant à son tour sur le volant. Les simulations de heurts sont ainsi suivies d'un retour de force dans le volant. D'autre part, quatre autres moteurs électriques asynchrones (de couleur bleue) liés aux quatre roues (aux moyeux) de la voiture ont pour effet de contrer la force motrice de la voiture et de simuler la route, dont, par exemple, les côtes et les descentes. L'inertie liée au freinage est également reproduite. Des capteurs virtuels, simulés dans le logiciel envoient les données aux API qui les transmettent par réseau à l'ordinateur embarqué de la voiture. La plateforme fonctionne en boucle ouverte : les 5 moteurs électriques forment la liaison entre le banc de contrôle et la voiture. Après avoir effectué les tests nécessaires, l'objectif est de tester les algorithmes pour véhicule autonome sur piste réelle voire sur route réelle.
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales
2017
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.