Année de production
2009

© Benoît RAJAU/ISIR/CNRS Images
20090001_0859
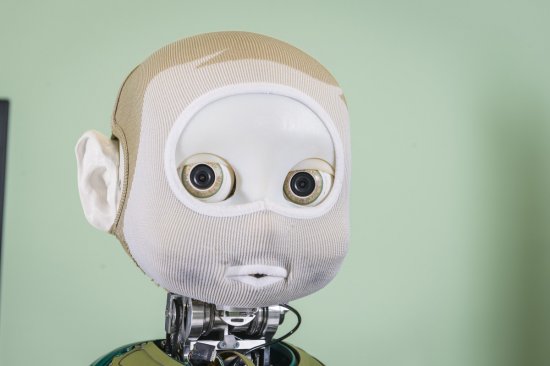
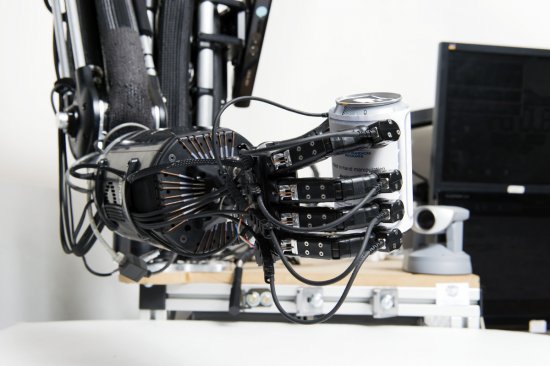
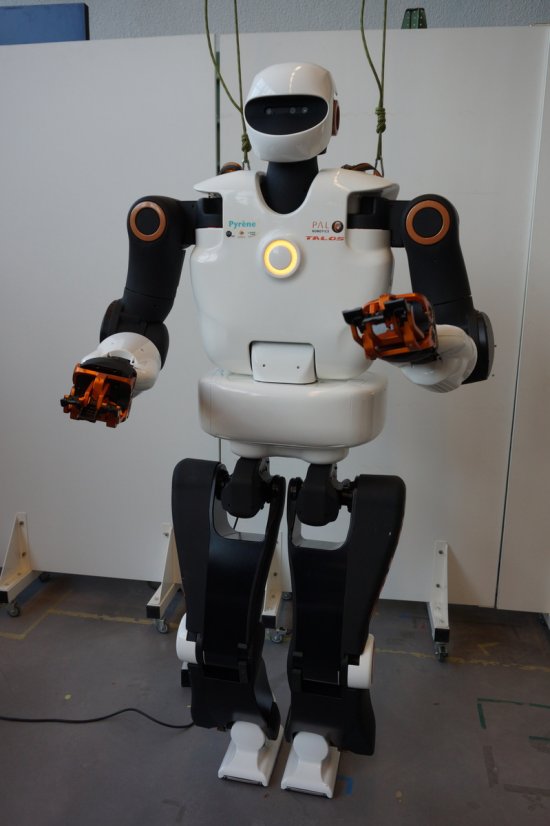
Détail du robot humanoïde iCub. Chaque actionneur possède une carte de contrôle (DSP) et un amplificateur de puissance placés localement, au plus proche de l'articulation. Des bus CAN (Controller Area Network) permettent une communication bi-directionnelle entre ces contrôleurs locaux et l'ordinateur PC104 placé dans la tête du robot qui centralise la couche de contrôle global. Ce robot anthropomorphe a été conçu comme une plateforme matérielle et logicielle ouverte dans le cadre du projet européen RobotCub. Les recherches concernant iCub à l'ISIR (Institut des Systèmes Intelligents et Robotiques) portent sur les aspects liés au contrôle adaptatif de mouvements et à la sélection d'actions motrices par des techniques d'apprentissage par renforcement.
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales
2009
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.