© LAAS/CNRS Images
Référence
20080001_0103
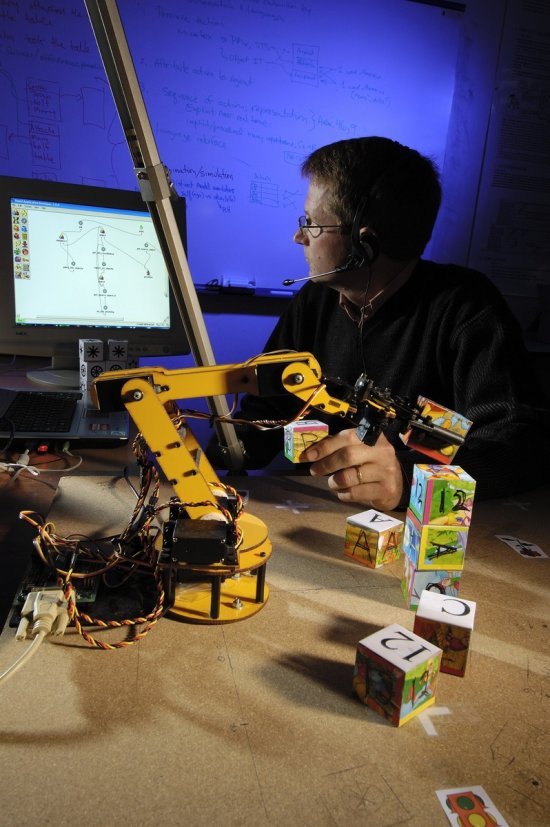
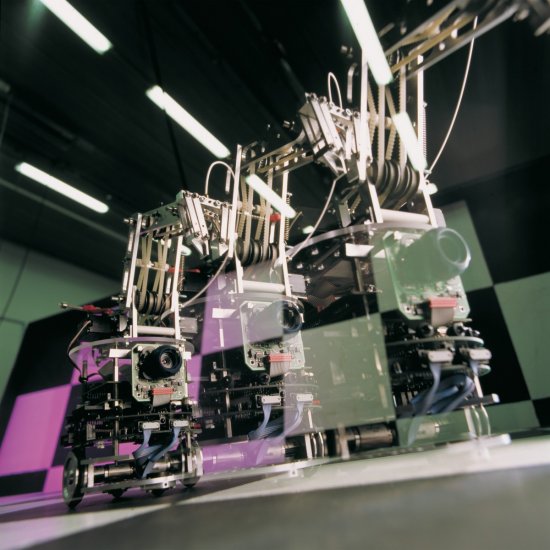
Simulation d'une tâche de manipulation coordonnée entre un mannequin numérique et un robot qui doive
Simulation d'une tâche de manipulation coordonnée entre un mannequin numérique et un robot qui doivent transporter une plaque dans une usine tout en évitant les obstacles. L'animation est calculée automatiquement par les algorithmes de planification de mouvement : l'utilisateur décrit la tâche à réaliser en donnant seulement le but à atteindre ; l'ensemble du mouvement est calculé automatiquement en quelques secondes.
Ajouter à ma sélection
Conditions d'utilisation
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales