© LAAS/CNRS Images
Reference
20080001_0103
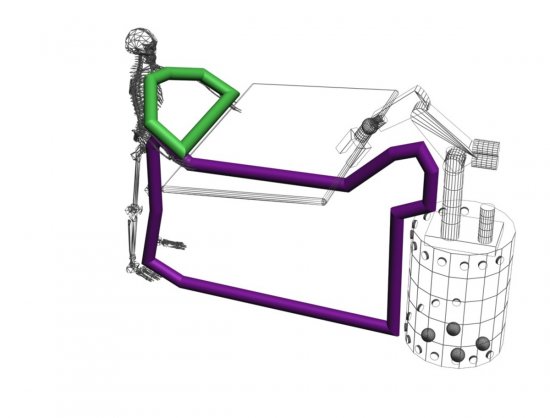
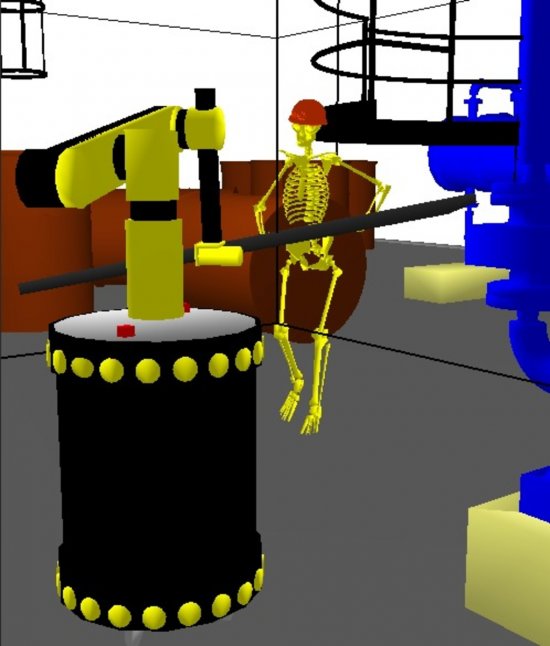
Simulation d'une tâche de manipulation coordonnée entre un mannequin numérique et un robot qui doive
Simulation d'une tâche de manipulation coordonnée entre un mannequin numérique et un robot qui doivent transporter une plaque dans une usine tout en évitant les obstacles. L'animation est calculée automatiquement par les algorithmes de planification de mouvement : l'utilisateur décrit la tâche à réaliser en donnant seulement le but à atteindre ; l'ensemble du mouvement est calculé automatiquement en quelques secondes.
Add to my selection
Terms of use
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions