Programme(s)
Année de production
2005

© Sébastien GODEFROY/CNRS Images
20050001_0919
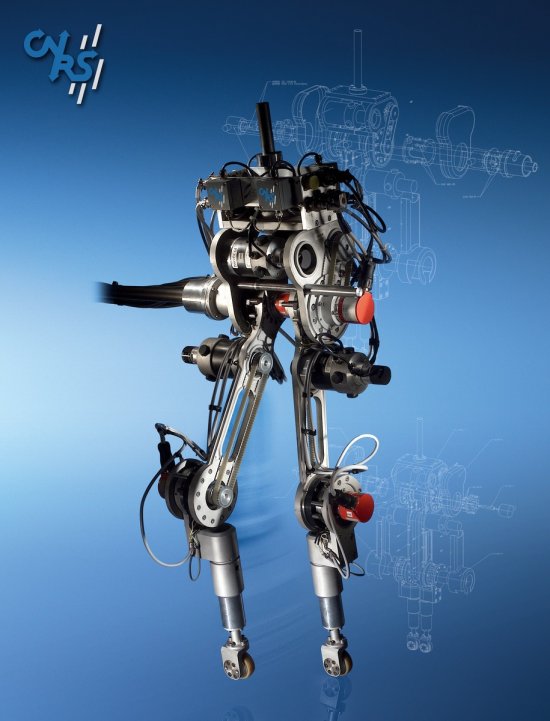
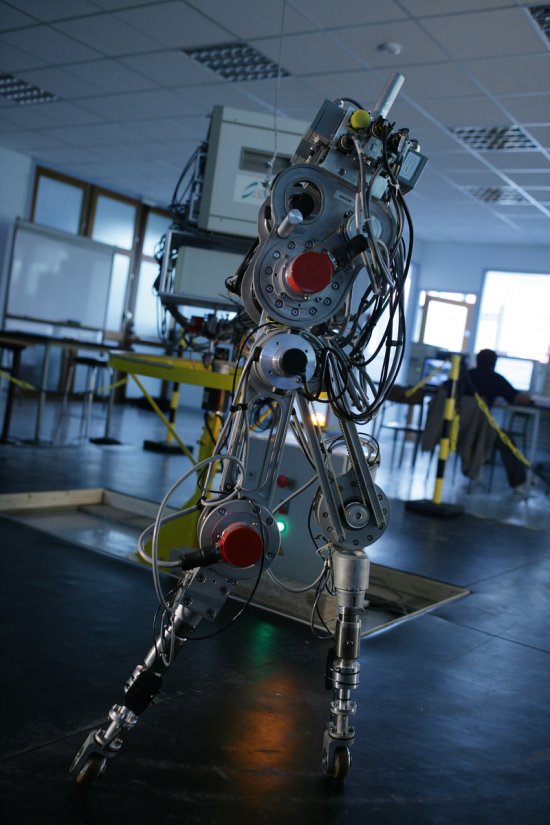
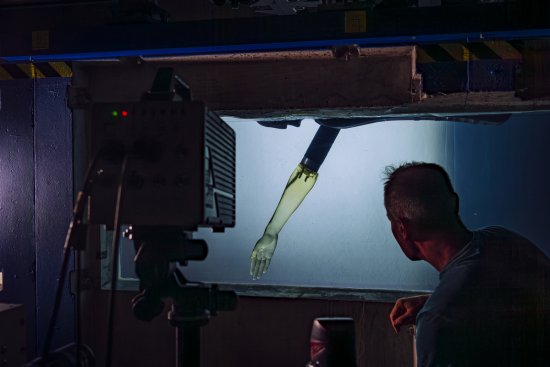
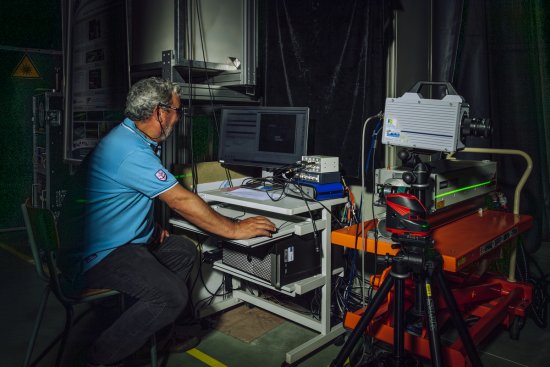
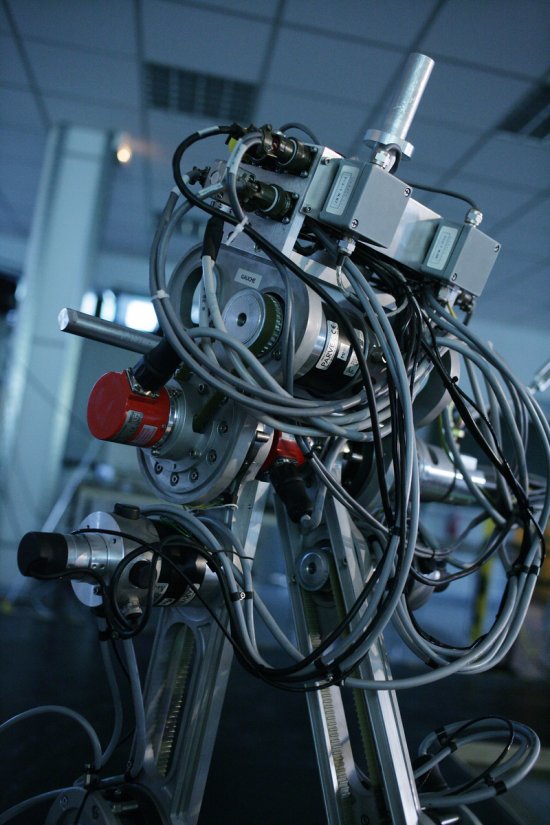
Détail du genou du robot bipède Rabbit développé dans le cadre du projet ROBEA-CNRS (Robotique et Entités Artificielles) "Commande pour la marche et la course d'un robot bipède". L'objectif de cette recherche est d'obtenir une génération naturelle de la marche, efficace et à faible dépense énergétique, pouvant permettre la conception de prothèses ou d'orthèses. L'équilibre statique du robot n'est pas souhaité à chaque instant au contraire, les phases de déséquilibre sont recherchées pour obtenir une marche dynamique. La structure est planaire, composée d'un tronc et de jambes motorisées aux seuls hanches et genoux, le contact entre pied et sol est ponctuel.
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales
2005
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.