© Artechnique/CNRS Images
Référence
20040001_0235
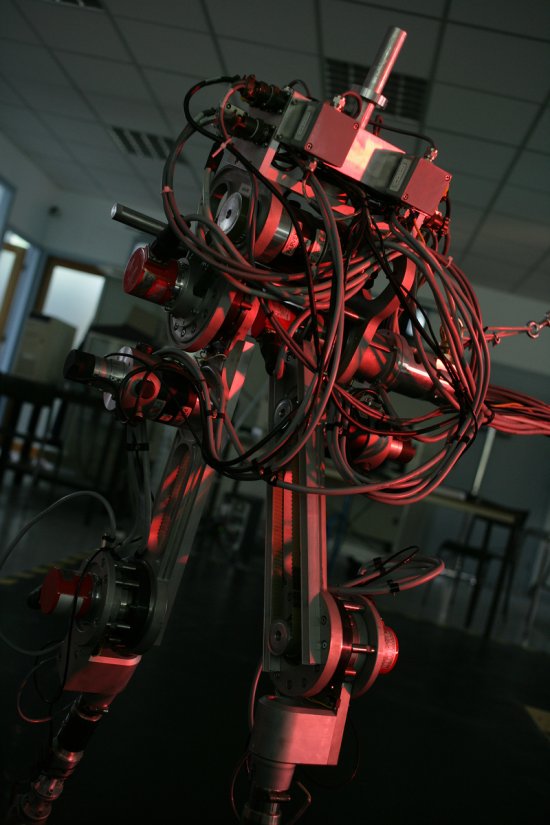
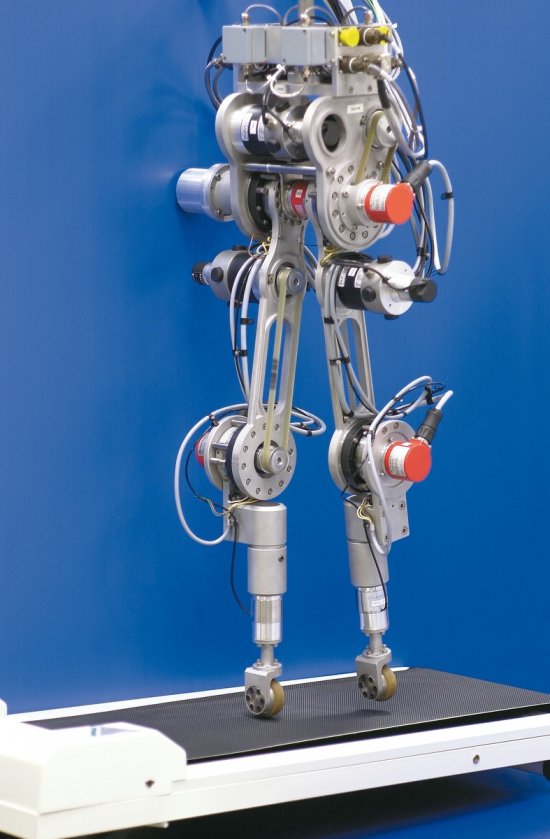
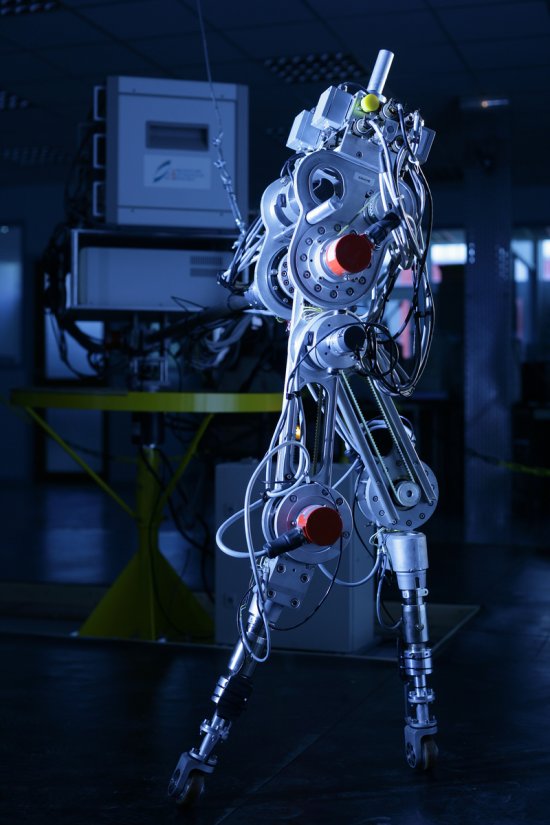
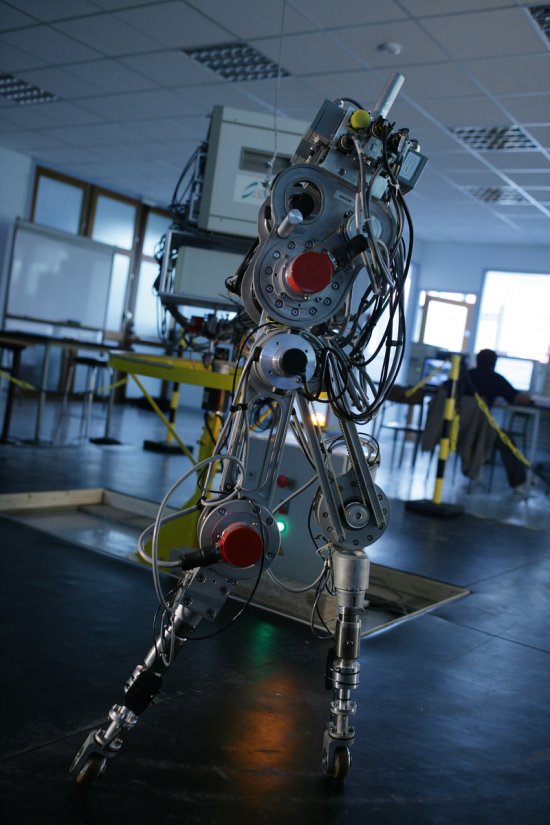
Prototype de robot bipède marcheur et coureur Rabbit, réalisé dans le cadre du projet CNRS ROBEA (Ro
Prototype de robot bipède marcheur et coureur Rabbit, réalisé dans le cadre du projet CNRS ROBEA (Robotique et Entités Artificielles). Rabbit possède 3 à 7 degrés de liberté (selon la phase du mouvement). Les robots à pattes posent des problèmes de commande spécifiques, très distincts de ceux de la robotique des bras manipulateurs et des robots mobiles à roues. Le contact robot-sol du robot marcheur fournit un bon exemple de singularité. S'y ajoutent la stratégie de commande d'un système complexe ou d'obtention d'un déplacement à vitesse constante à faible consommation d'énergie.
Ajouter à ma sélection
Conditions d'utilisation
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales