© Artechnique/CNRS Images
Reference
20040001_0235
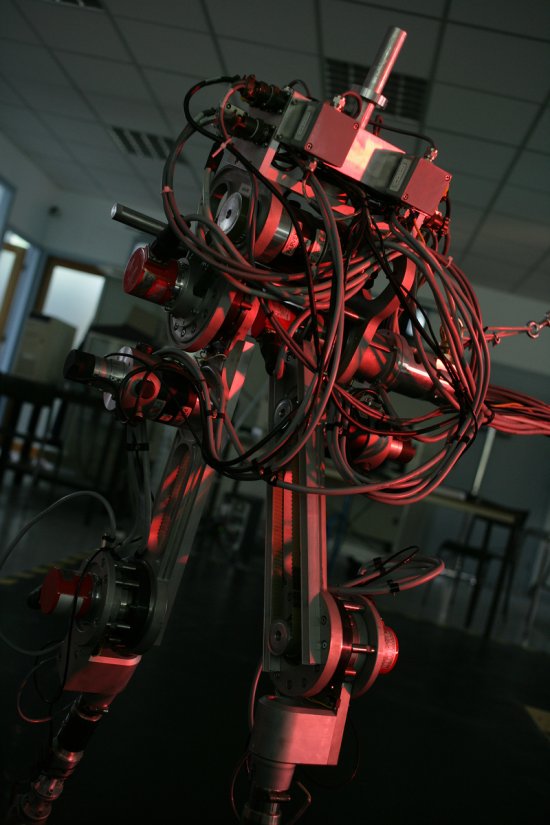
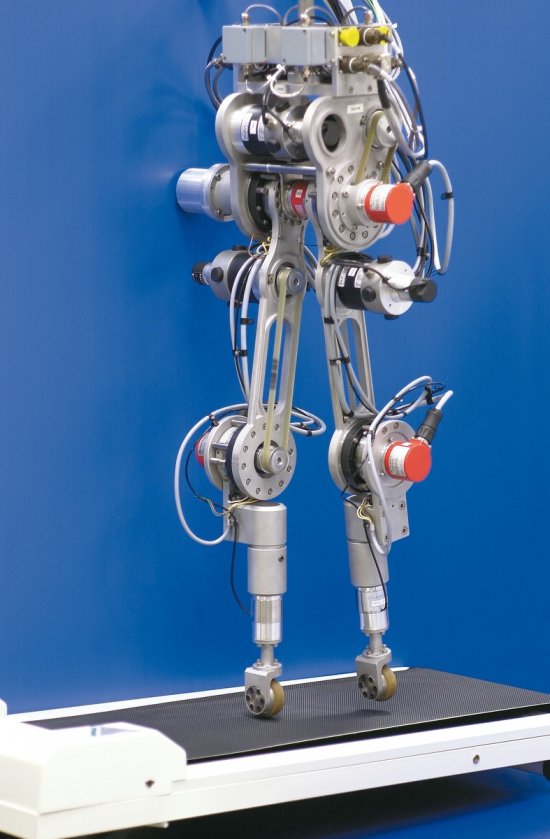
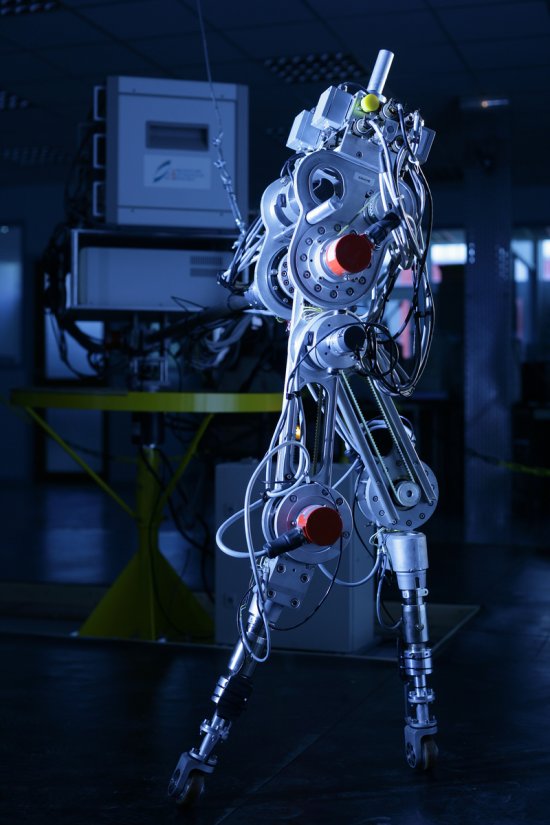
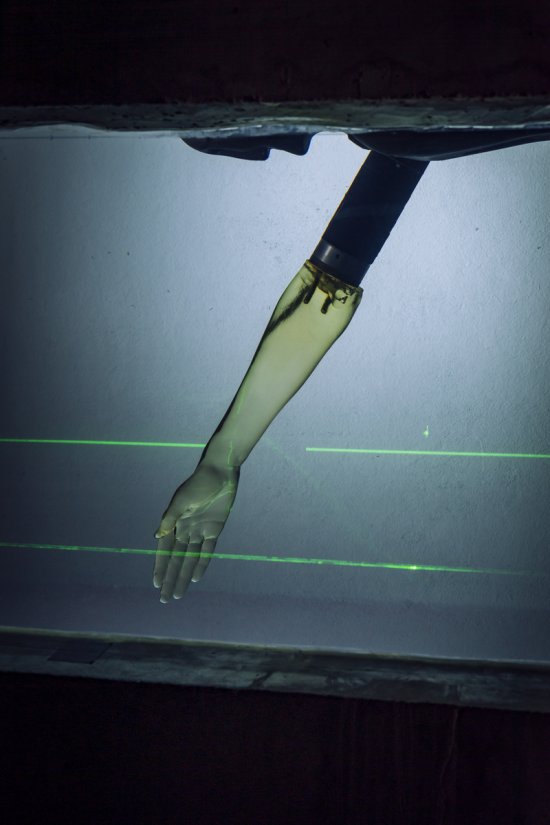
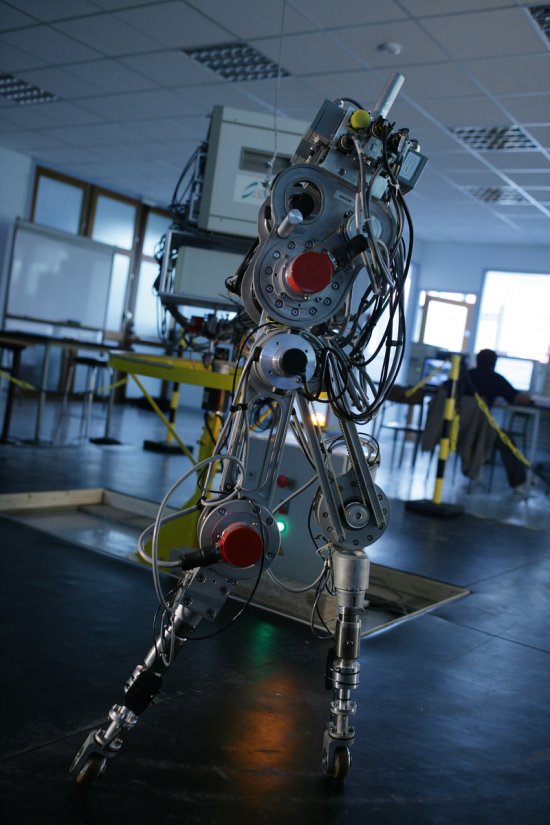
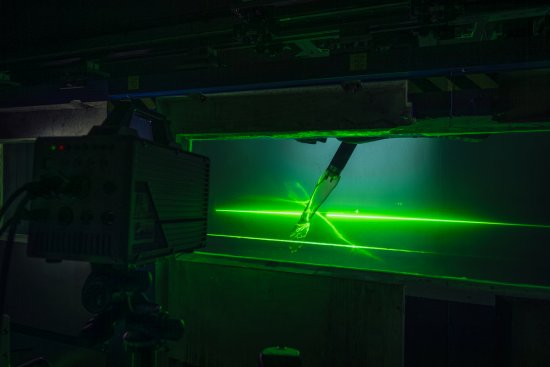
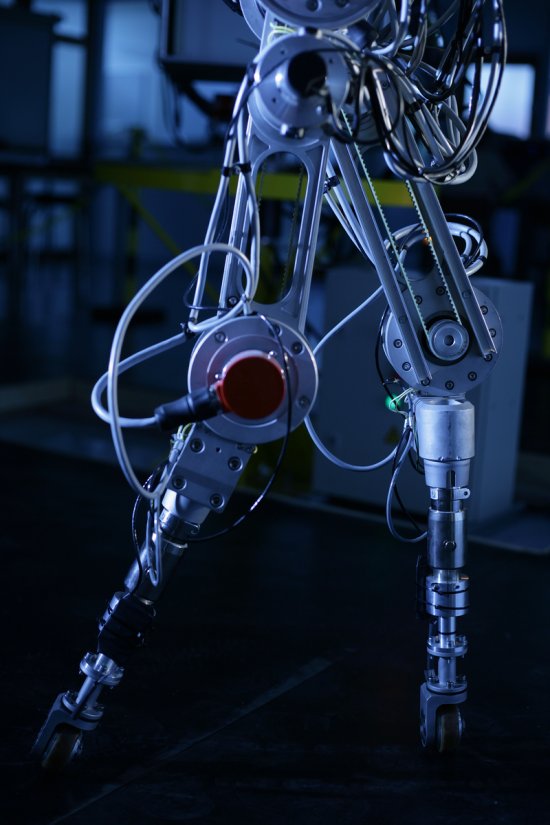
Prototype de robot bipède marcheur et coureur Rabbit, réalisé dans le cadre du projet CNRS ROBEA (Ro
Prototype de robot bipède marcheur et coureur Rabbit, réalisé dans le cadre du projet CNRS ROBEA (Robotique et Entités Artificielles). Rabbit possède 3 à 7 degrés de liberté (selon la phase du mouvement). Les robots à pattes posent des problèmes de commande spécifiques, très distincts de ceux de la robotique des bras manipulateurs et des robots mobiles à roues. Le contact robot-sol du robot marcheur fournit un bon exemple de singularité. S'y ajoutent la stratégie de commande d'un système complexe ou d'obtention d'un déplacement à vitesse constante à faible consommation d'énergie.
Add to my selection
Terms of use
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions