Research program(s)
Production year
2005

© Sébastien GODEFROY/CNRS Images
20050001_0917
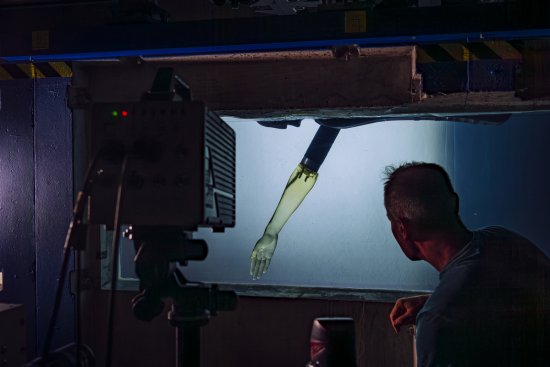
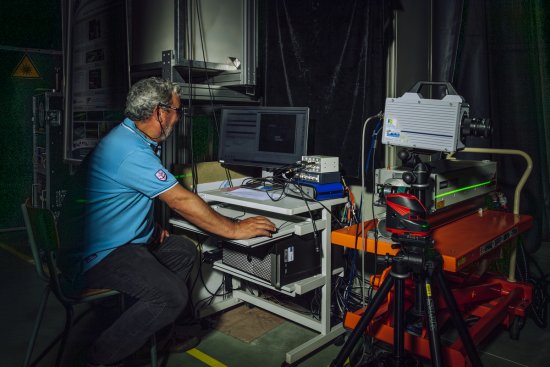
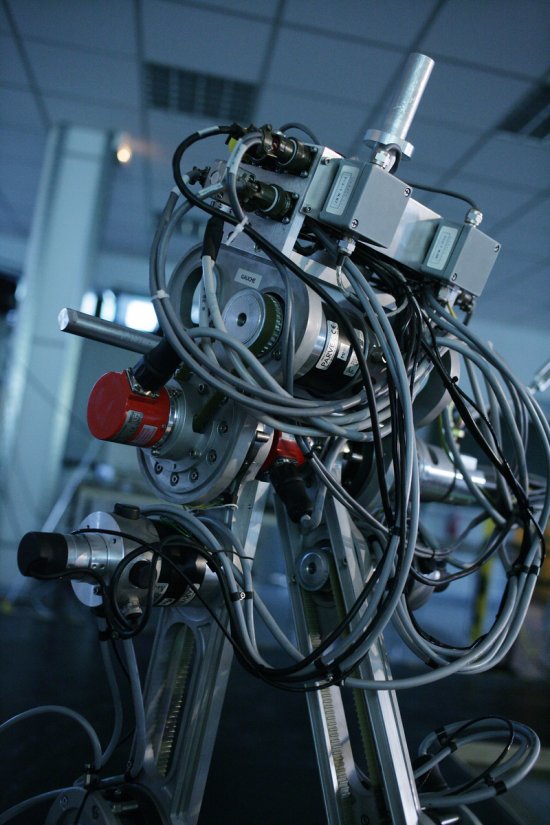
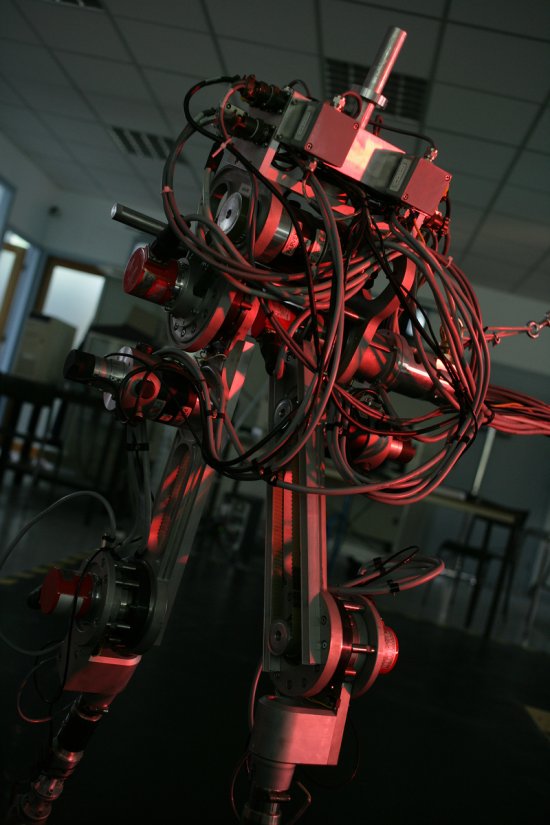
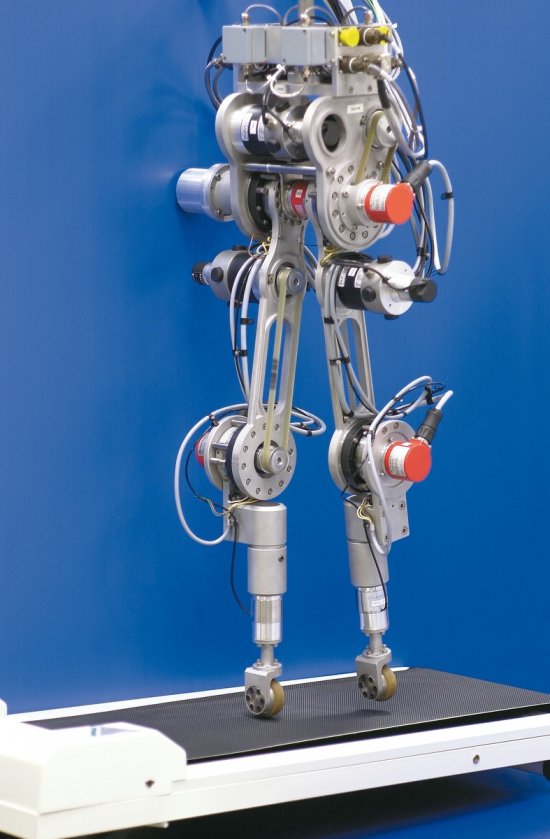
Robot bipède Rabbit développé dans le cadre du projet ROBEA-CNRS (Robotique et Entités Artificielles) "Commande pour la marche et la course d'un robot bipède". L'objectif de cette recherche est d'obtenir une génération naturelle de la marche, efficace et à faible dépense énergétique, pouvant permettre la conception de prothèses ou d'orthèses. L'équilibre statique du robot n'est pas souhaité à chaque instant au contraire, les phases de déséquilibre sont recherchées pour obtenir une marche dynamique. La structure est planaire, composée d'un tronc et de jambes motorisées aux seuls hanches et genoux, le contact entre pied et sol est ponctuel.
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions
2005
Our work is guided by the way scientists question the world around them and we translate their research into images to help people to understand the world better and to awaken their curiosity and wonderment.