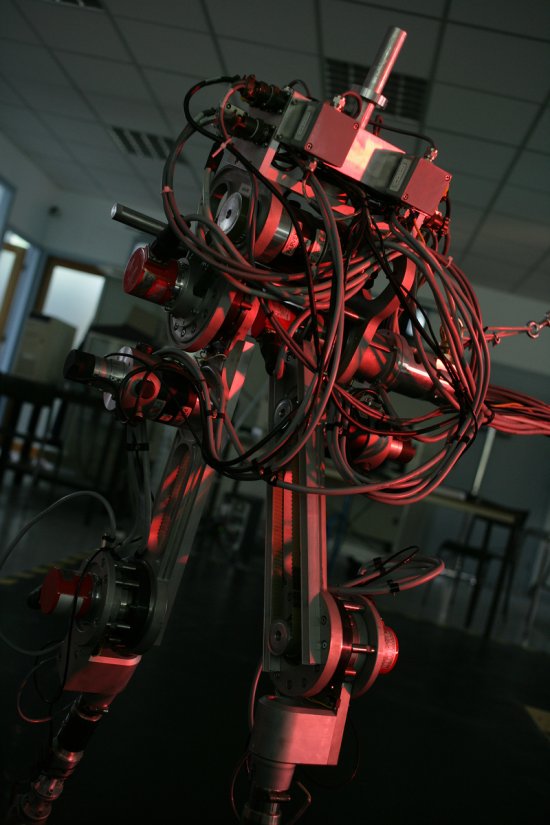
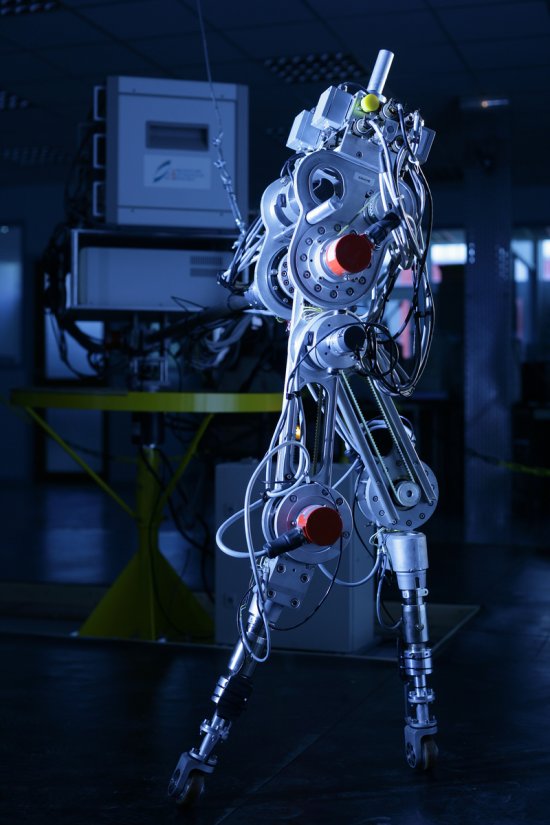
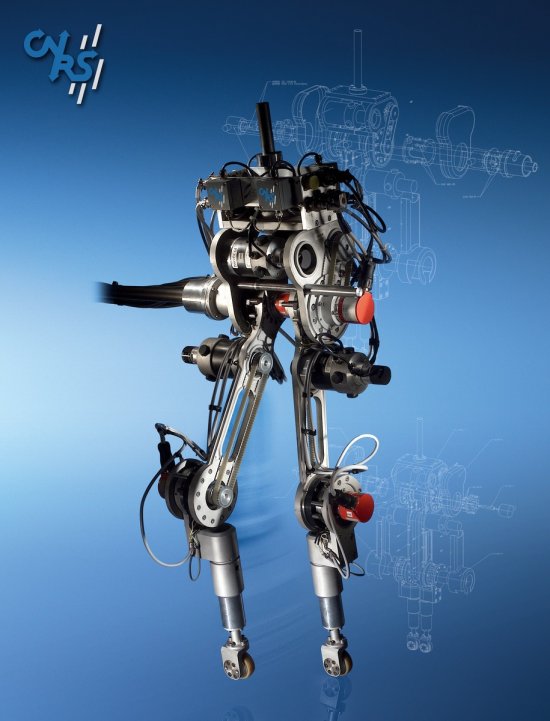
Robot bipède Rabbit développé dans le cadre du projet ROBEA-CNRS (Robotique et Entités Artificielles) " Commande pour la marche et la course d'un robot bipède ". L'objectif de cette recherche est d'obtenir une génération naturelle de la marche, efficace et à faible dépense énergétique, pouvant permettre la conception de prothèses ou d'orthèses. L'équilibre statique du robot n'est pas souhaité à chaque instant au contraire, les phases de déséquilibre sont recherchées pour obtenir une marche…
Robot bipède Rabbit développé dans le cadre du projet ROBEA-CNRS (Robotique et Entités Artificielles) " Commande pour la marche et la course d'un robot bipède ". L'objectif de cette recherche est d'obtenir une génération naturelle de la marche, efficace et à faible dépense énergétique, pouvant permettre la conception de prothèses ou d'orthèses. L'équilibre statique du robot n'est pas souhaité à chaque instant au contraire, les phases de déséquilibre sont recherchées pour obtenir une marche…
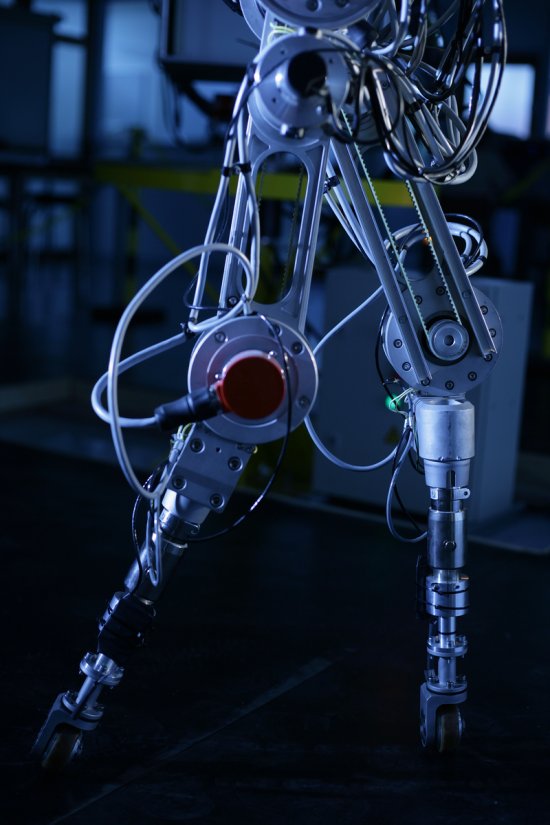
Détail du genou du robot bipède Rabbit développé dans le cadre du projet ROBEA-CNRS (Robotique et Entités Artificielles) "Commande pour la marche et la course d'un robot bipède". L'objectif de cette recherche est d'obtenir une génération naturelle de la marche, efficace et à faible dépense énergétique, pouvant permettre la conception de prothèses ou d'orthèses. L'équilibre statique du robot n'est pas souhaité à chaque instant au contraire, les phases de déséquilibre sont recherchées pour…
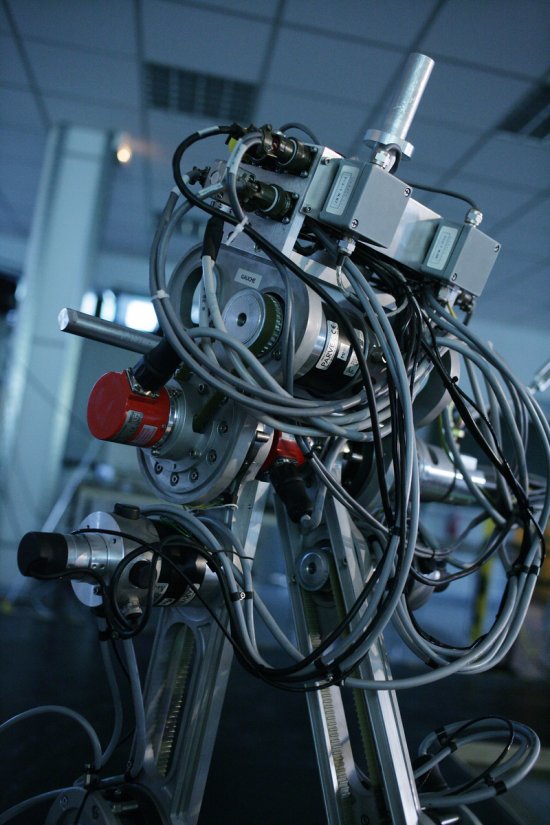
Détail de la hanche du robot bipède Rabbit développé dans le cadre du projet ROBEA-CNRS (Robotique et Entités Artificielles) "Commande pour la marche et la course d'un robot bipède". L'objectif de cette recherche est d'obtenir une génération naturelle de la marche, efficace et à faible dépense énergétique, pouvant permettre la conception de prothèses ou d'orthèses. L'équilibre statique du robot n'est pas souhaité à chaque instant au contraire, les phases de déséquilibre sont recherchées pour…
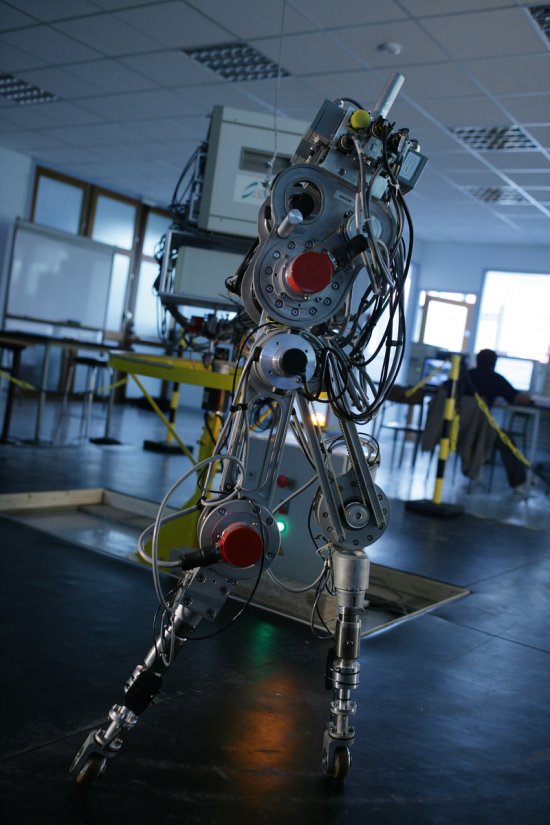
Robot bipède Rabbit développé dans le cadre du projet ROBEA-CNRS (Robotique et Entités Artificielles) " Commande pour la marche et la course d'un robot bipède ". L'objectif de cette recherche est d'obtenir une génération naturelle de la marche, efficace et à faible dépense énergétique, pouvant permettre la conception de prothèses ou d'orthèses. L'équilibre statique du robot n'est pas souhaité à chaque instant au contraire, les phases de déséquilibre sont recherchées pour obtenir une marche…
Robot bipède Rabbit développé dans le cadre du projet ROBEA-CNRS (Robotique et Entités Artificielles) "Commande pour la marche et la course d'un robot bipède". L'objectif de cette recherche est d'obtenir une génération naturelle de la marche, efficace et à faible dépense énergétique, pouvant permettre la conception de prothèses ou d'orthèses. L'équilibre statique du robot n'est pas souhaité à chaque instant au contraire, les phases de déséquilibre sont recherchées pour obtenir une marche…
Robot bipède Rabbit développé dans le cadre du projet ROBEA-CNRS (Robotique et Entités Artificielles) "Commande pour la marche et la course d'un robot bipède". L'objectif de cette recherche est d'obtenir une génération naturelle de la marche, efficace et à faible dépense énergétique, pouvant permettre la conception de prothèses ou d'orthèses. L'équilibre statique du robot n'est pas souhaité à chaque instant au contraire, les phases de déséquilibre sont recherchées pour obtenir une marche…
Robot bipède Rabbit développé dans le cadre du projet ROBEA-CNRS (Robotique et Entités Artificielles) "Commande pour la marche et la course d'un robot bipède". L'objectif de cette recherche est d'obtenir une génération naturelle de la marche, efficace et à faible dépense énergétique, pouvant permettre la conception de prothèses ou d'orthèses. L'équilibre statique du robot n'est pas souhaité à chaque instant, au contraire, les phases de déséquilibre sont recherchées pour obtenir une marche…
Robot bipède Rabbit développé dans le cadre du projet ROBEA-CNRS (Robotique et Entités Artificielles) " Commande pour la marche et la course d'un robot bipède ". L'objectif de cette recherche est d'obtenir une génération naturelle de la marche, efficace et à faible dépense énergétique, pouvant permettre la conception de prothèses ou d'orthèses. L'équilibre statique du robot n'est pas souhaité à chaque instant au contraire, les phases de déséquilibre sont recherchées pour obtenir une marche…
Robot bipède Rabbit développé dans le cadre du projet ROBEA-CNRS (Robotique et Entités Artificielles) "Commande pour la marche et la course d'un robot bipède". L'objectif de cette recherche est d'obtenir une génération naturelle de la marche, efficace et à faible dépense énergétique, pouvant permettre la conception de prothèses ou d'orthèses. L'équilibre statique du robot n'est pas souhaité à chaque instant au contraire, les phases de déséquilibre sont recherchées pour obtenir une marche…
Robot bipède Rabbit développé dans le cadre du projet ROBEA-CNRS (Robotique et Entités Artificielles) "Commande pour la marche et la course d'un robot bipède". L'objectif de cette recherche est d'obtenir une génération naturelle de la marche, efficace et à faible dépense énergétique, pouvant permettre la conception de prothèses ou d'orthèses. L'équilibre statique du robot n'est pas souhaité à chaque instant au contraire, les phases de déséquilibre sont recherchées pour obtenir une marche…
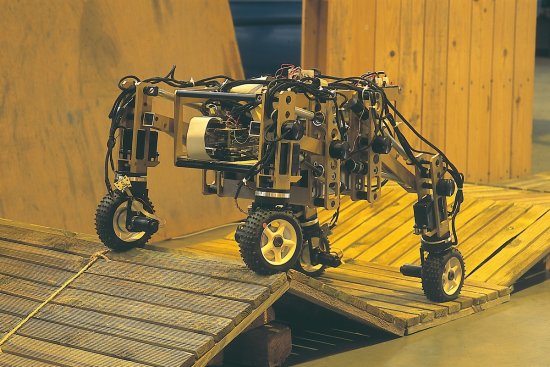
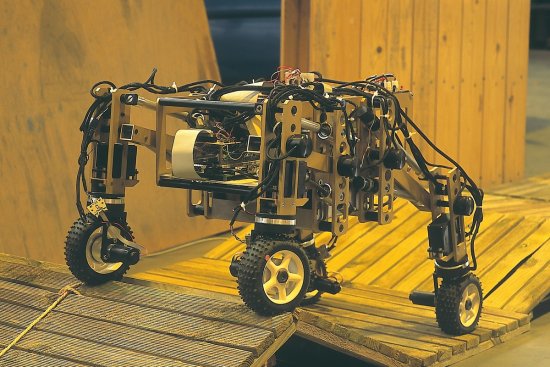
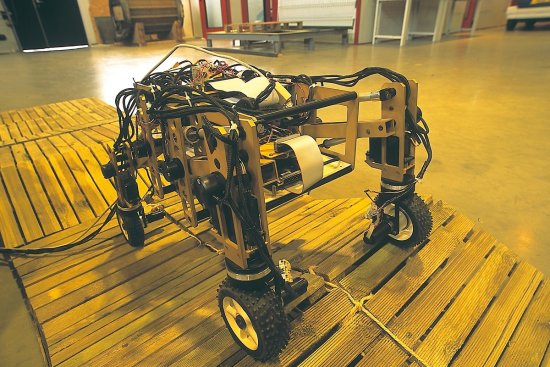
Le robot Hylos est un véhicule autonome tout-terrain équipé d'organes de propulsion hybride roue-patte. Ce système à 16 degrés de liberté se déplace en combinant traction des roues et mouvements internes de la structure, lui conférant ainsi une grande capacité d'adaptation et de franchissement d'obstacles sur des sols accidentés (optimisation de la stabilité). Les applications concernent l'exploration planétaire ou volcanique pour des tâches de type mesure d'observation scientifique. Hylos est…
Le robot Hylos est un véhicule autonome tout-terrain équipé d'organes de propulsion hybride roue-patte. Ce système à 16 degrés de liberté se déplace en combinant traction des roues et mouvements internes de la structure, lui conférant ainsi une grande capacité d'adaptation et de franchissement d'obstacles sur des sols accidentés (optimisation de la stabilité). Les applications concernent l'exploration planétaire ou volcanique pour des tâches de type mesure d'observation scientifique. Hylos est…
Le robot Hylos est un véhicule autonome tout-terrain équipé d'organes de propulsion hybride roue-patte. Ce système à 16 degrés de liberté se déplace en combinant traction des roues et mouvements internes de la structure, lui conférant ainsi une grande capacité d'adaptation et de franchissement d'obstacles sur des sols accidentés (optimisation de la stabilité). Les applications concernent l'exploration planétaire ou volcanique pour des tâches de type mesure d'observation scientifique. Hylos est…
Le robot Hylos est un véhicule autonome tout-terrain équipé d'organes de propulsion hybride roue-patte. Ce système à 16 degrés de liberté se déplace en combinant traction des roues et mouvements internes de la structure, lui conférant ainsi une grande capacité d'adaptation et de franchissement d'obstacles sur des sols accidentés (optimisation de la stabilité). Les applications concernent l'exploration planétaire ou volcanique pour des tâches de type mesure d'observation scientifique. Hylos est…
Le robot Hylos est un véhicule autonome tout-terrain équipé d'organes de propulsion hybride roue-patte. Ce système à 16 degrés de liberté se déplace en combinant traction des roues et mouvements internes de la structure, lui conférant ainsi une grande capacité d'adaptation et de franchissement d'obstacles sur des sols accidentés (optimisation de la stabilité). Les applications concernent l'exploration planétaire ou volcanique pour des tâches de type mesure d'observation scientifique. Hylos est…
Prototype de robot bipède marcheur et coureur Rabbit, réalisé dans le cadre du projet CNRS ROBEA (Robotique et Entités Artificielles). Rabbit possède 3 à 7 degrés de liberté (selon la phase du mouvement). Les robots à pattes posent des problèmes de commande spécifiques, très distincts de ceux de la robotique des bras manipulateurs et des robots mobiles à roues. Le contact robot-sol du robot marcheur fournit un bon exemple de singularité. S'y ajoutent la stratégie de commande d'un système…
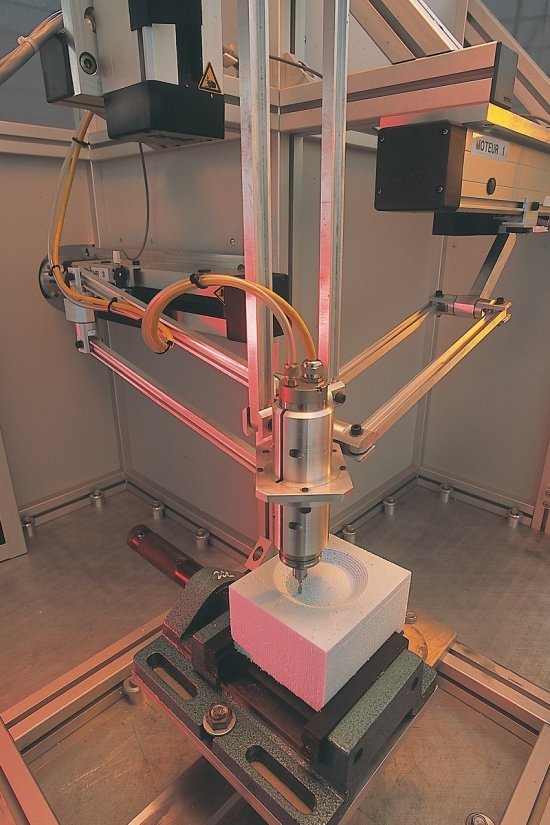
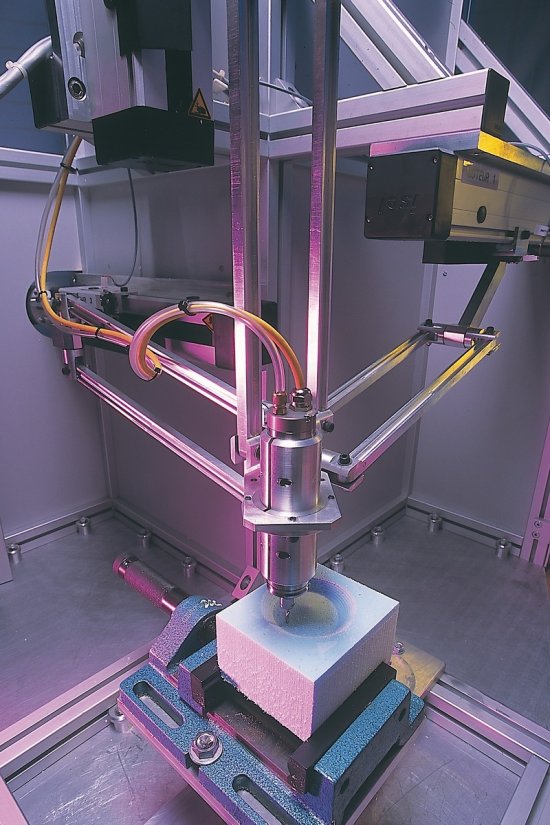
"Orthoglide" est un prototype de machine-outil rapide innovante, d'architecture parallèle. Sa conception repose sur un critère mathématique : l'isotropie qui traduit l'homogénéité des performances en tout point et dans toutes les directions du volume de travail. Ses caractéristiques principales sont des performances dynamiques élevées avec un volume de travail régulier et important. Les applications principales sont l'usinage à grande vitesse, le prototypage rapide et le soudage laser.
"Orthoglide", réalisé dans le cadre du projet MAX de ROBEA, est un prototype de machine-outil rapide innovante, d'architecture parallèle. Sa conception repose sur un critère mathématique : l'isotropie qui traduit l'homogénéité des performances en tout point et dans toutes les directions du volume de travail. Ses caractéristiques principales sont des performances dynamiques élevées avec un volume de travail régulier et important. Les applications principales sont l'usinage à grande vitesse, le…
Prototype de robot bipède marcheur et coureur Rabbit, réalisé dans le cadre du projet CNRS ROBEA (Robotique et Entités Artificielles). Rabbit possède 3 à 7 degrés de liberté (selon la phase du mouvement). Les robots à pattes posent des problèmes de commande spécifiques, très distincts de ceux de la robotique des bras manipulateurs et des robots mobiles à roues. Le contact robot-sol du robot marcheur fournit un bon exemple de singularité. S'y ajoutent la stratégie de commande d'un système…
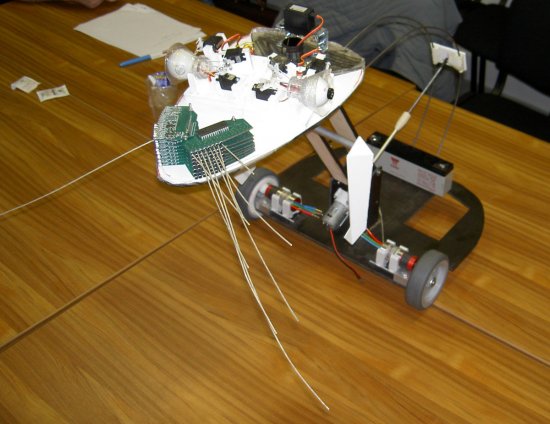
Prototype de Robot rat "Psikharpax" qui vise à modéliser les comportements biologiques élémentaires du rat. Equipé d'une architecture de contrôle inspirée de l'anatomie et de la physiologie de diverses structures du cerveau du rat, il pourra élaborer des stratégies de déplacements, en fonction de ses motivations et émotions. Ce robot contribue à l'avancement des sciences cognitives et de l'intelligence artificielle. Il devrait aussi permettre d'élargir la notion d'autonomie en robotique.
Prototype de Robot rat "Psikharpax" qui vise à modéliser les comportements biologiques élémentaires du rat. Equipé d'une architecture de contrôle inspirée de l'anatomie et de la physiologie de diverses structures du cerveau du rat, il pourra élaborer des stratégies de déplacements, en fonction de ses motivations et émotions. Ce robot contribue à l'avancement des sciences cognitives et de l'intelligence artificielle. Il devrait aussi permettre d'élargir la notion d'autonomie en robotique.
Robot parallèle "H4", à 4 degrés de liberté. Les robots parallèles, cousins éloignés des robots anthropomorphes représentent un nouveau concept de robots, plus forts, plus rapides et plus précis. La multiplication des bras articulés pourvus chacun d'un seul moteur permet de réduire les efforts à fournir pour supporter une charge ou d'effectuer des mouvements très rapides, avec une grande précision. Les mouvements des bras sont coordonnés par un calculateur. L'association des deux types de…
"Orthoglide" est un prototype de machine-outil rapide innovante, d'architecture parallèle. Sa conception repose sur un critère mathématique : l'isotropie qui traduit l'homogénéité des performances en tout point et dans toutes les directions du volume de travail. Ses caractéristiques principales sont des performances dynamiques élevées avec un volume de travail régulier et important. Les applications principales sont l'usinage à grande vitesse, le prototypage rapide et le soudage laser.
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.