© Jérôme CHATIN/CNRS Images
Référence
20030001_1409
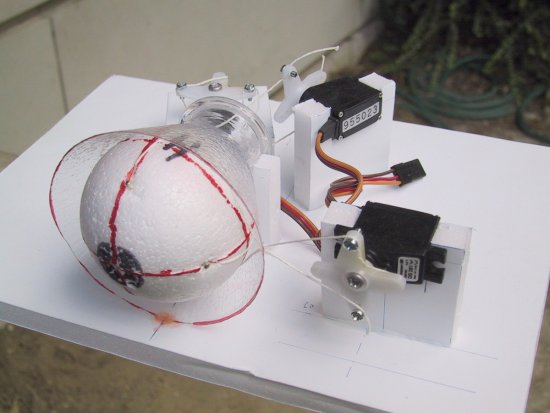
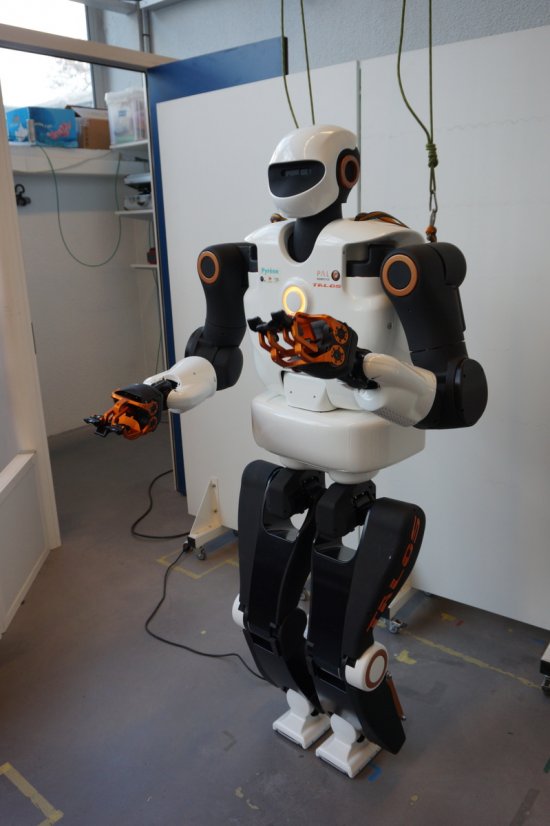
Robot parallèle 4 axes doté d'une accélération de 15 G pour une capacité de manutention de 1 Kg, il
Robot parallèle 4 axes doté d'une accélération de 15 G pour une capacité de manutention de 1 Kg, il est capable d'effectuer 150 cycles en U par minute. Equipé d'une ventouse en guise d'outil de préhension, il constitue l'élément central d'une cellule composée de deux convoyeurs, d'un système de vision et d'un outil logiciel de conception de projets intégrant la reconnaissance de formes. Dédié aux opérations de prise et de dépose à la volée, il est destiné à des applications de type emballage, palettisation et conditionnement hautes cadences robotiques.
Ajouter à ma sélection
Conditions d'utilisation
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales