© Jérôme CHATIN/CNRS Images
Reference
20030001_1409
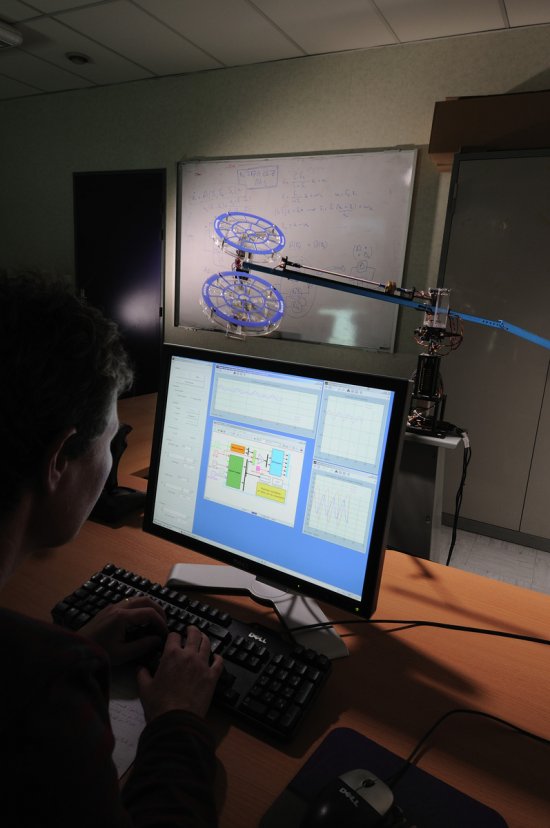
Robot parallèle 4 axes doté d'une accélération de 15 G pour une capacité de manutention de 1 Kg, il
Robot parallèle 4 axes doté d'une accélération de 15 G pour une capacité de manutention de 1 Kg, il est capable d'effectuer 150 cycles en U par minute. Equipé d'une ventouse en guise d'outil de préhension, il constitue l'élément central d'une cellule composée de deux convoyeurs, d'un système de vision et d'un outil logiciel de conception de projets intégrant la reconnaissance de formes. Dédié aux opérations de prise et de dépose à la volée, il est destiné à des applications de type emballage, palettisation et conditionnement hautes cadences robotiques.
Add to my selection
Terms of use
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions