Année de production
2003

© Leif CARLSSON/CNRS Images
20030001_0554
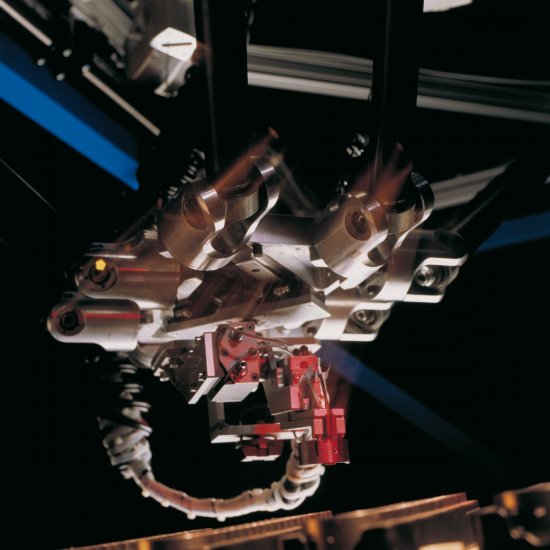
Robot I4R : Robot rapide dédié aux tâches de pick-and-place. Contrairement aux robots conventionnels, l'architecture parallèle de ce robot permet de réduire au minimum les masses en mouvement, ce qui permet d'atteindre des accélérations de 10 G (10 fois l'accélération d'un corps en chute libre). L'application typique de ce genre de robot est la manipulation rapide d'objets légers. Par exemple dans l'industrie agroalimentaire, il s'agit de saisir des objets sur un tapis roulant et de les déposer dans leur conditionnement à des cadences pouvant atteindre 3 objets à la seconde.
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales
2003
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.