
Reportage Photo
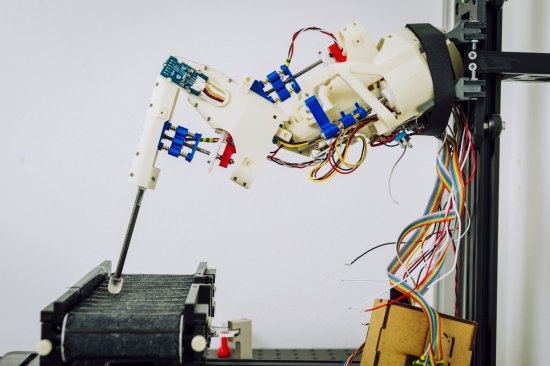
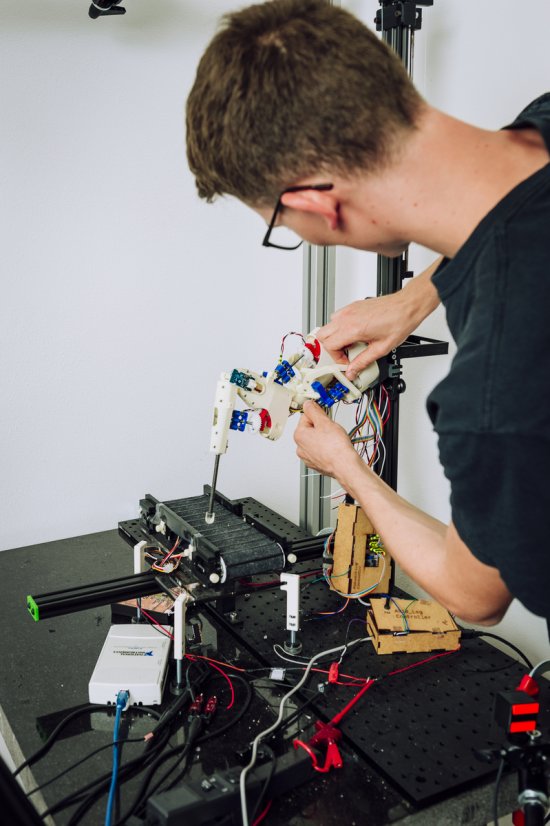
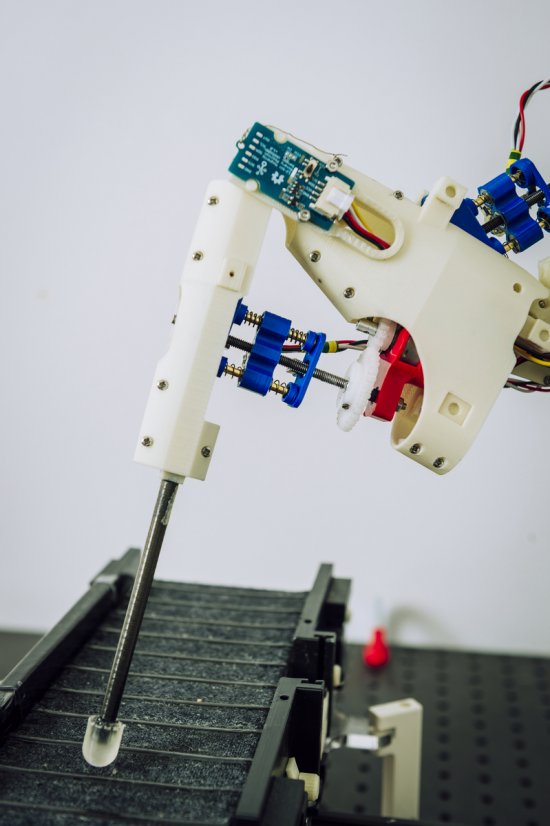
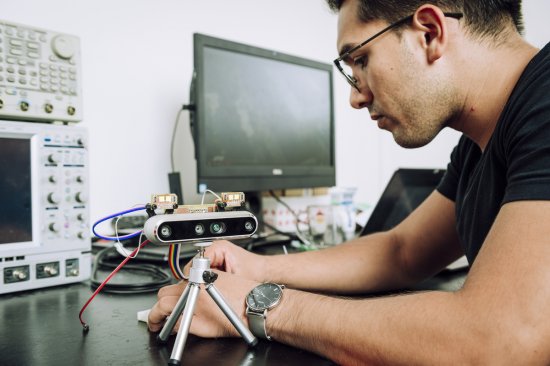
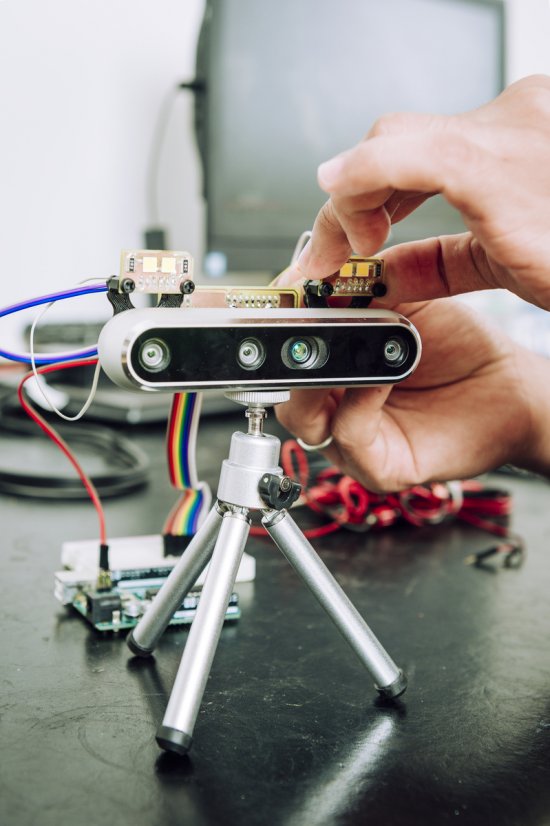
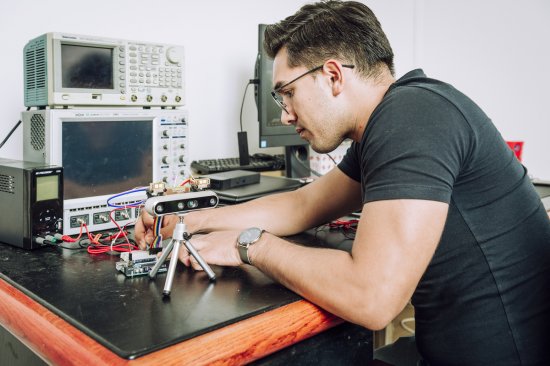
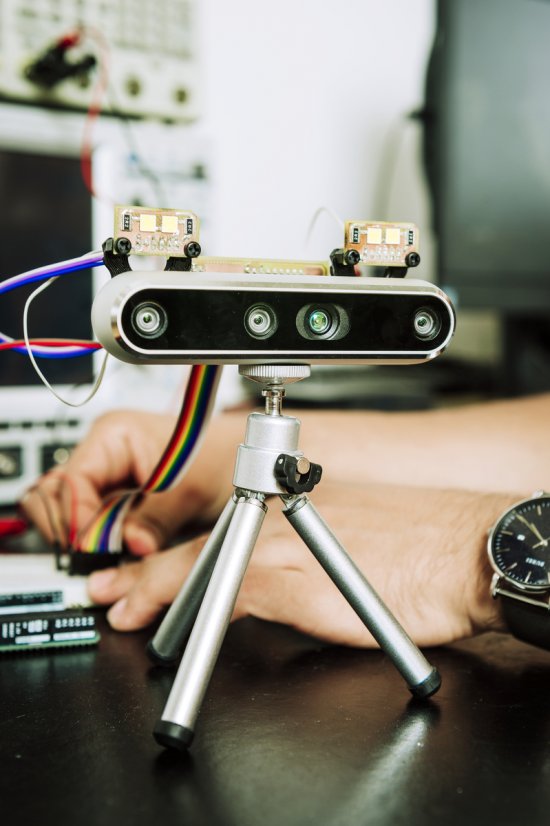
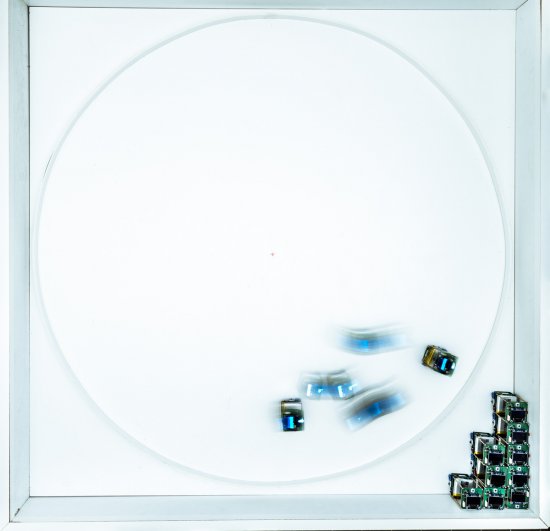
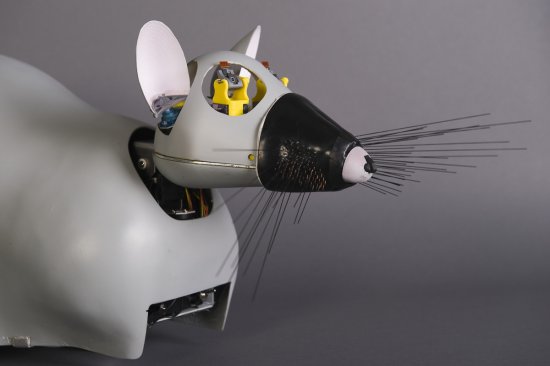
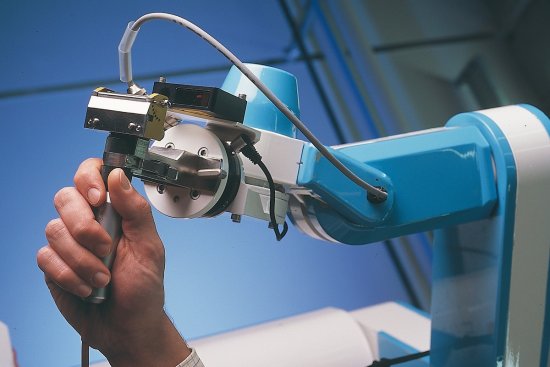
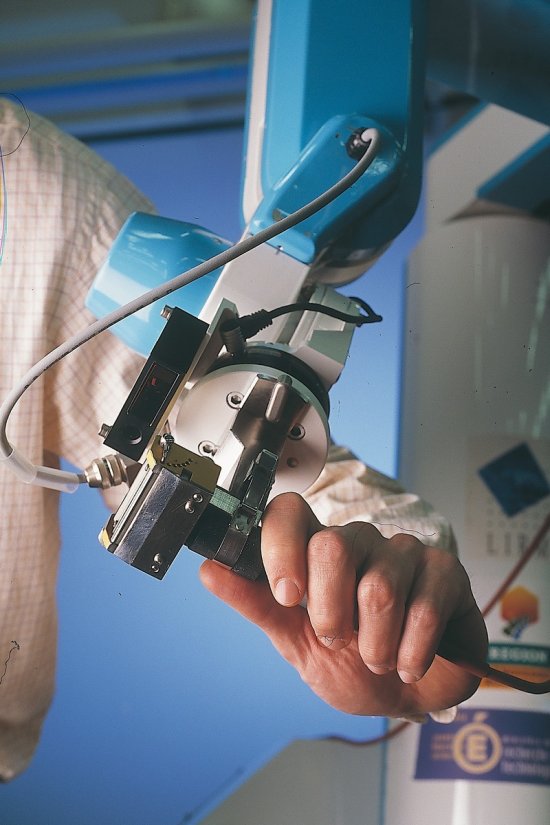
Drones et robots bioinspirés
Les scientifiques s'inspirent des oiseaux, des insectes ou encore des poissons, pour optimiser le déplacement et le fonctionnement de drones et de robots mobiles.























CNRS Images,
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.