Année de production
2022

© Cyril FRESILLON / ISM / CNRS Images
20220153_0015
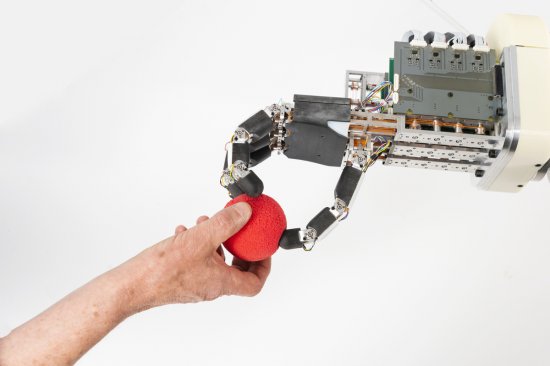
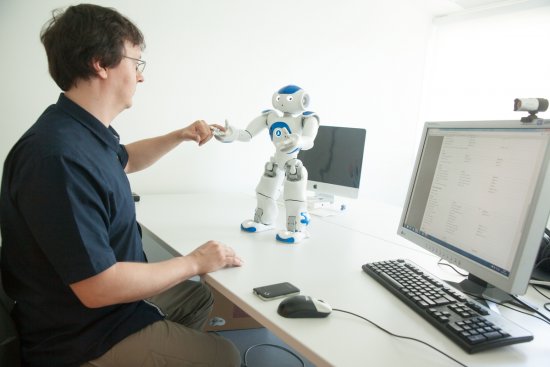
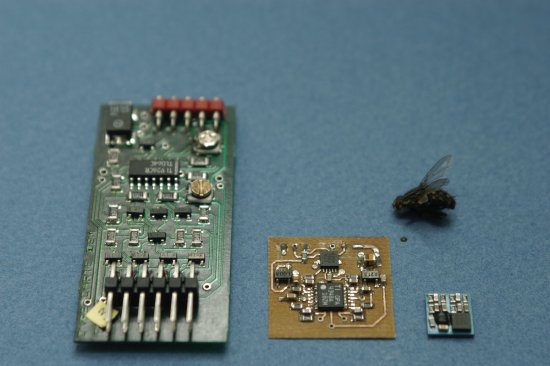
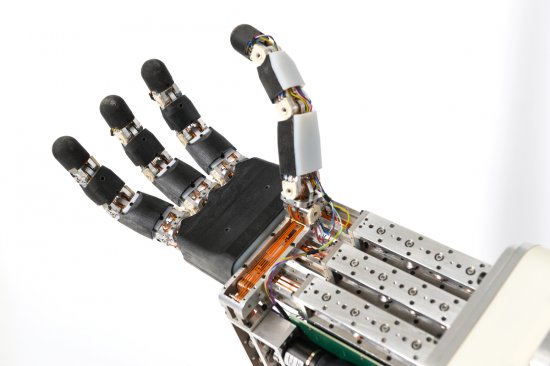
Réglage d'un prototype de patte robotique inspiré des pattes de fourmis. Les scientifiques essayent de reproduire le fonctionnement et la structure de ce mécanisme biologique pour l'intégrer à un robot hexapode. Ils étudient notamment comment augmenter son autonomie et son déplacement grâce à la répartition des forces en s'inspirant de l'exosquelette de la fourmi, l'angle d'inclinaison de ses pattes, et des organes sensoriels qui lui permettent d'améliorer ses performances énergétiques lors de la marche. Cela peut permettre à ce bio-robot (contraction de biologie et de robot) de parcourir plus de chemin, sur des terrains plus complexes, là où les robots à roues ou les êtres humains ne pourraient pas avoir accès facilement.
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales
2022
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.