Année de production
2021

© Cyril FRESILLON / Irisa / CNRS Images
20210098_0034
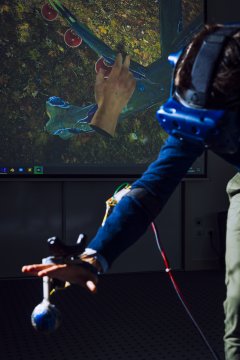
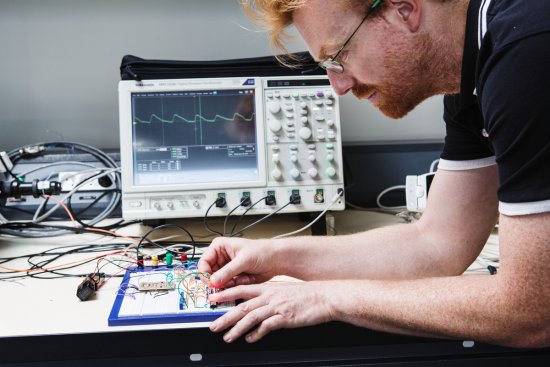
Test d’une interface haptique portable développée à l'Irisa. Le scientifique qui porte ce bracelet vibrant réalise une opération chirurgicale sur un fantôme, en manipulant à distance un bras robotisé muni d'un scalpel. Le bracelet vibre si la lame n'est pas bien positionnée. Les technologies haptiques portables de ce type sont des outils prometteurs de l’interaction humain-machine. Ils permettent de développer le travail collaboratif entre humains et robots, grâce à une communication efficace basée sur le sens du toucher plutôt que sur la parole. Ainsi l’interface peut orienter l’humain en anticipant le trajet du robot, le prévenir d’un danger imminent comme la présence d’un obstacle sur sa route, ou tout simplement signaler un changement dans le statut du robot (épuisement de la batterie) ou l’avancement de sa tâche.
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales
2021
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.