Année de production
2020

© Cyril FRESILLON / LAAS / CNRS Images
20200084_0055
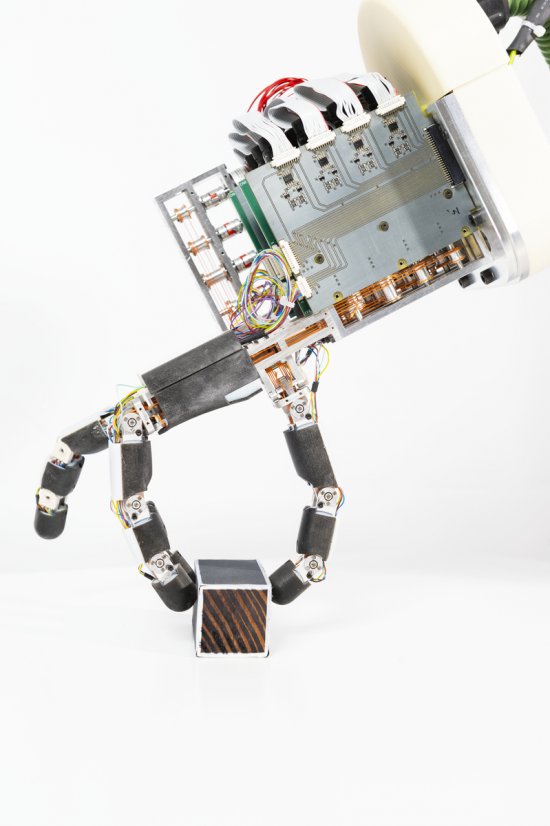
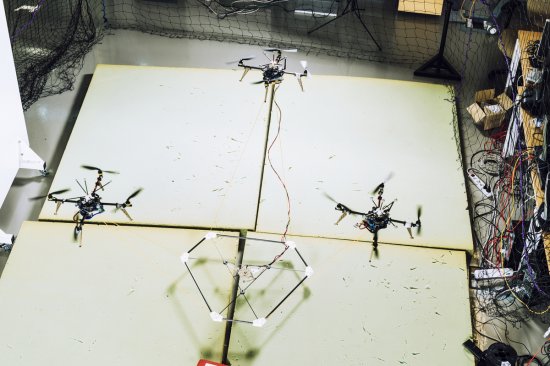
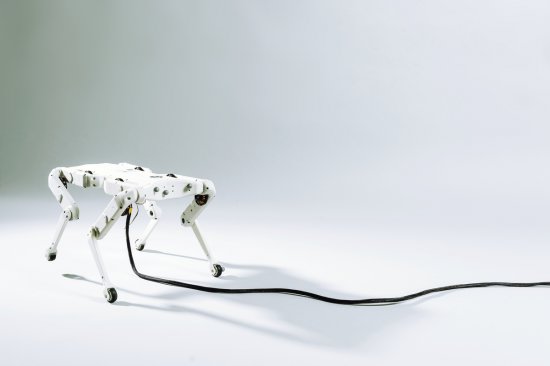
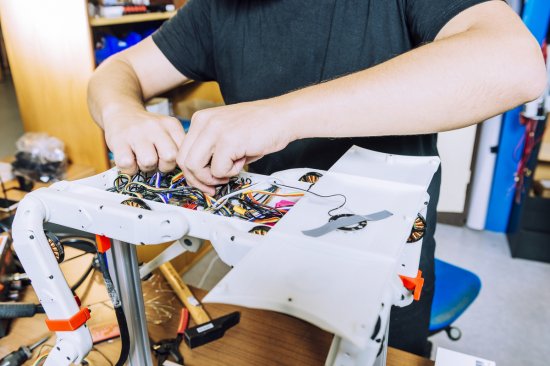
Test du robot de taille de vigne R2T2. Pour le développement en laboratoire, les deux bras manipulateurs de ce robot sont montés sur un cadre temporaire (beige et jaune). R2T2 est un robot agricole autonome capable de se déplacer dans un vignoble pour tailler de manière appropriée chaque pied de vigne. A cette fin, il perçoit la plante, dont il modélise et identifie les différents éléments en temps réel. Puis, sur la base de règles de taille, il établit les parties à sectionner. R2T2 doit aussi planifier le mouvement à exécuter, afin d’éviter de heurter la vigne ou les fils, et de respecter ses capacités dynamiques et la cinématique. Afin de développer des stratégies de définition et de contrôle du mouvement, le LAAS-CNRS a conçu et imprimé en 3D un pied de vigne modulaire (marron). Il est constitué de modules interchangeables pour permettre de multiples configurations, et muni de marqueurs infra-rouge (blancs). Grâce à un système de capture de mouvement (caméra en arrière-plan) ce modèle permet de définir les consignes que doit atteindre l'organe de coupe en conditions idéales. L’utilisation d’un robot pour la taille de vigne vise notamment à réduire la pénibilité du travail sur les exploitations viticoles.
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales
2020
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.