Année de production
2020

© Cyril FRÉSILLON / ISIR / CNRS Images
20200028_0009
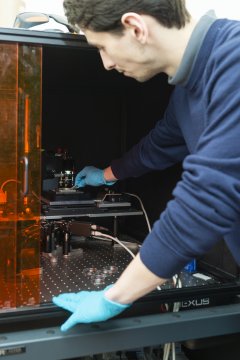
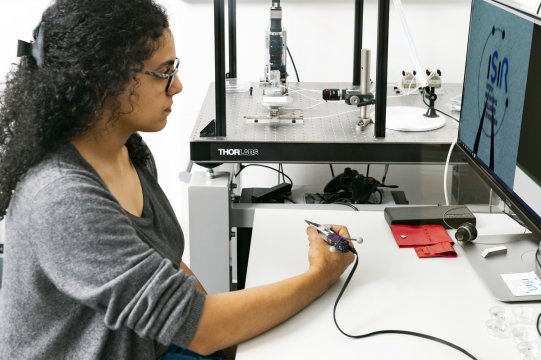
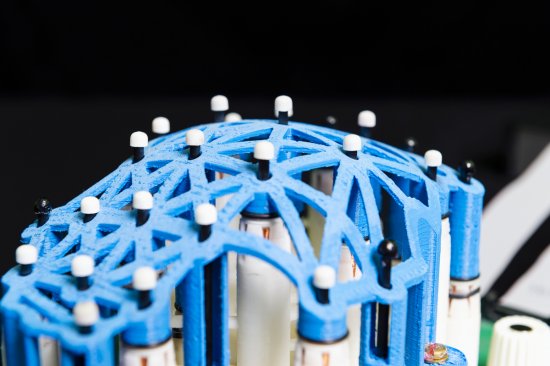
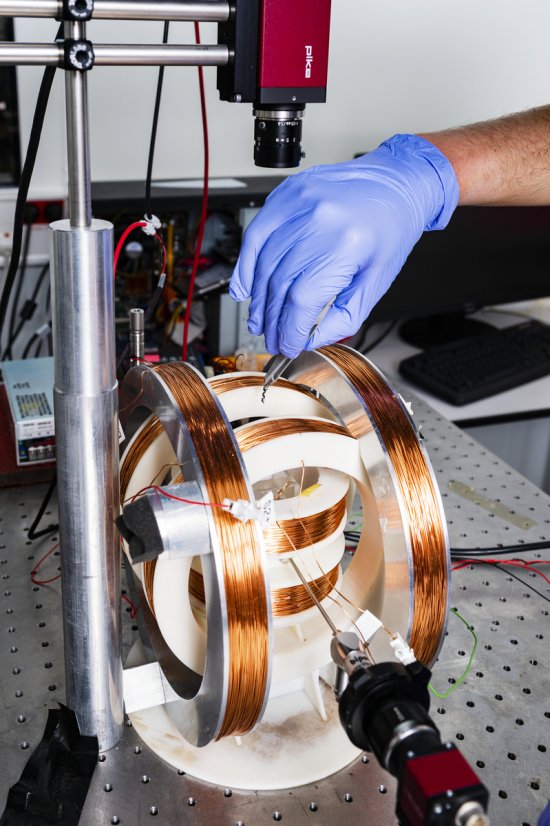
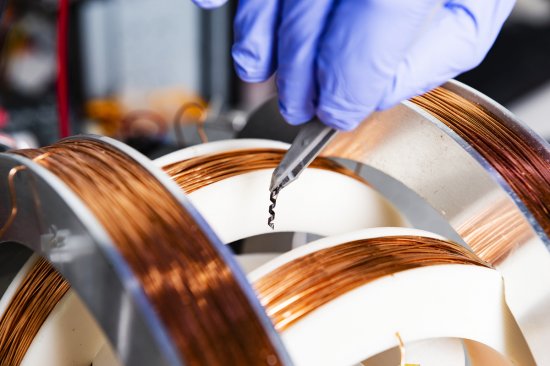
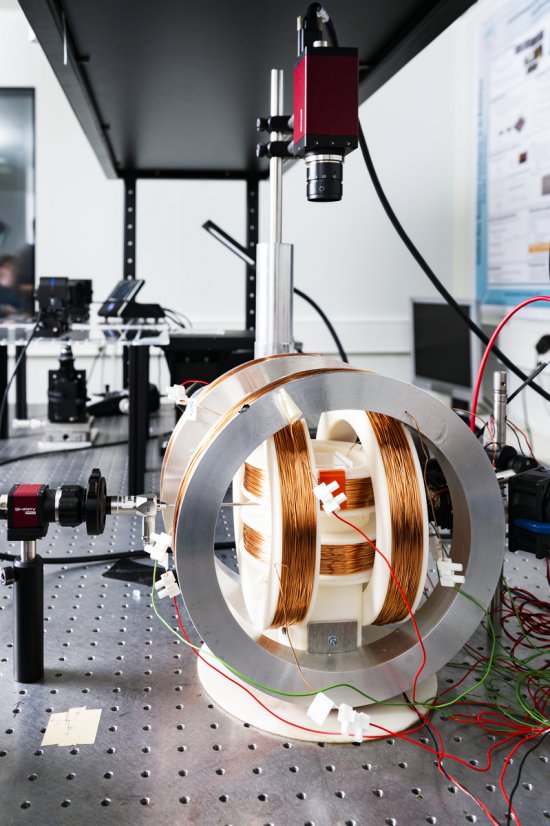
Insertion d’un porte-échantillon contenant un robot nageur dans une plateforme de microrobotique mobile permettant de contrôler la trajectoire de micronageurs par actionnement magnétique. Le dispositif possède deux caméras qui permettent un retour visuel, via la reconstruction 3D d’environnement, pour détecter la position du nageur et contrôler sa trajectoire. A l’heure actuelle, le contrôle hors plan est à l’étape de la preuve de concept et les nageurs sont encore de taille centimétrique. Leur forme hélicoïdale leur permet de se déplacer efficacement en milieu visqueux. A terme, ils pourraient être utilisés pour des analyses sanguines dans le cadre de laboratoires sur puce (lab-on-a-chip), des dispositifs intégrés miniaturisés rassemblant une ou plusieurs fonctions de laboratoire.
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales
2020
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.