Année de production
2020

© Cyril FRESILLON / PPRIME / CNRS Images
20200037_0009
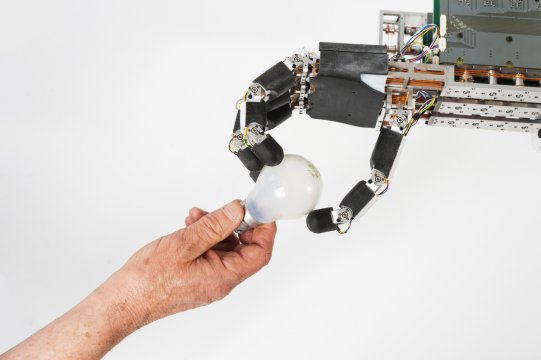
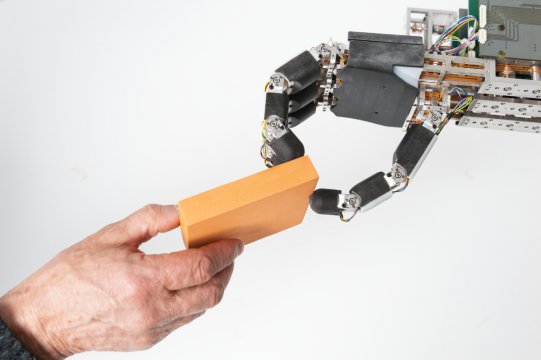
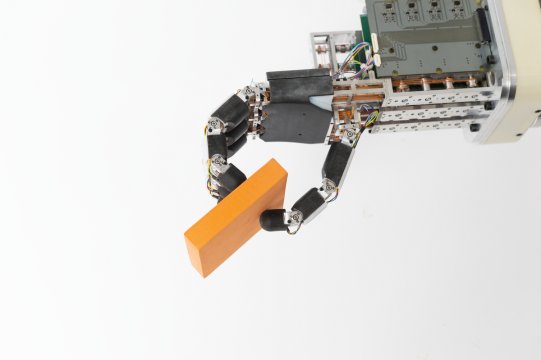
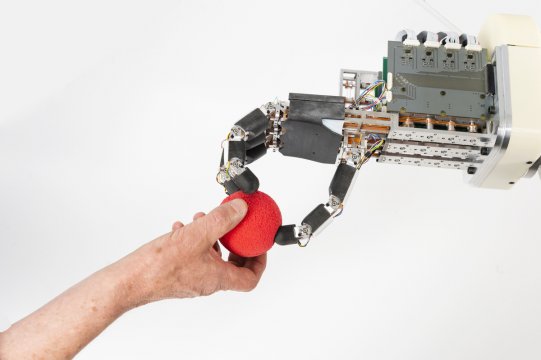
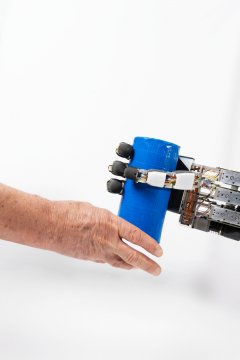
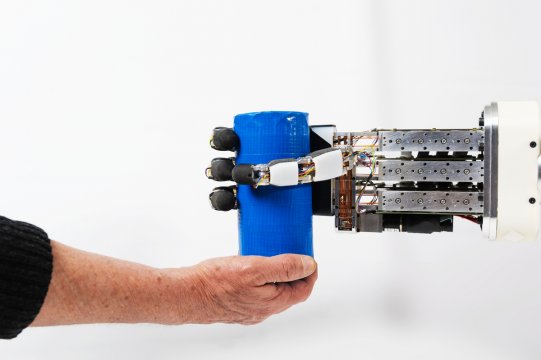
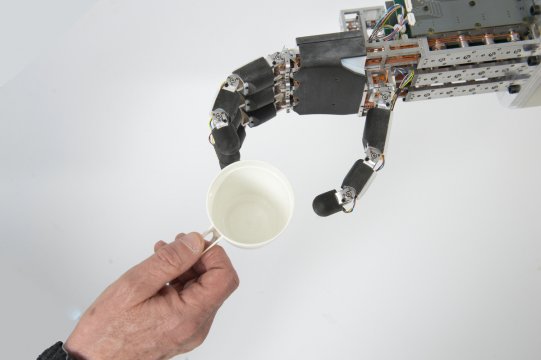
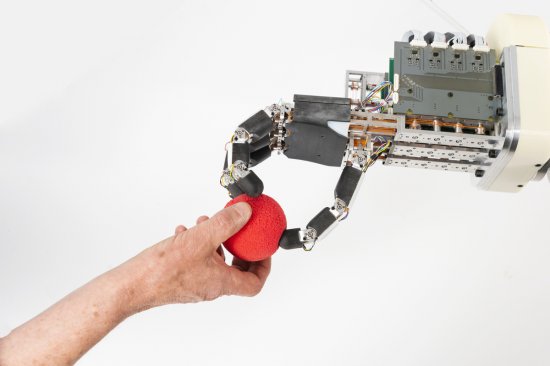
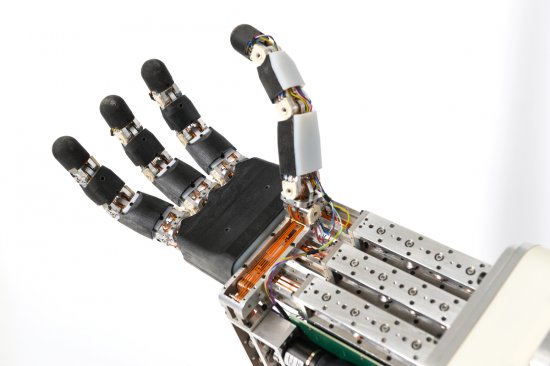
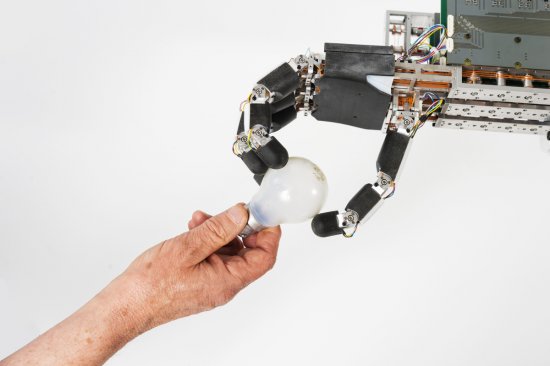
Test d’une main robotique à haut niveau de dextérité, à 4 doigts et 16 actionneurs. Elle est capable de saisir une grande variété d’objets (rigides, souples, etc.) tout en garantissant leur stabilité et en préservant l’intégrité physique des objets fragiles, grâce à une technologie d’évaluation des efforts de serrage couplée d’une capacité naturelle à adapter la rigidité de ses gestes (compliance). Grâce au nombre élevé d’actionneurs (un par articulation), elle s’adapte à la forme de l’objet saisi (on parle de saisie adaptative) et peut le déplacer finement à l’intérieur de la main. Son quatrième doigt lui permet de repositionner l’objet saisi sans avoir à le déposer et le reprendre. Elle est ainsi capable de produire des mouvements fins de grande amplitude ou de réorienter l'objet saisi. L’objectif de cette main robotique, l’une des plus habiles au monde, est d’égaler les capacités de préhension d’une main humaine.
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales
2020
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.