© Cyril FRESILLON/CNRS Images
Référence
20110001_0689
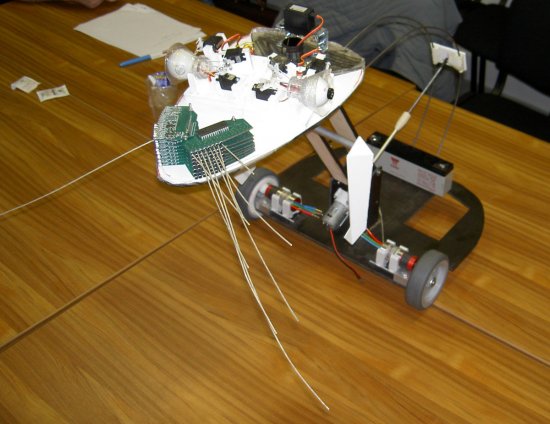
Vue de détail d'un prototype de robot parallèle à actionnement par câbles. L'objectif est de réalise
Vue de détail d'un prototype de robot parallèle à actionnement par câbles. L'objectif est de réaliser des robots manipulateurs destinés aux très grands déplacements (plusieurs dizaines de mètres).
Ajouter à ma sélection
Conditions d'utilisation
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales