Institut de recherche en informatique et systèmes aléatoires (IRISA)
RENNES CEDEX
L’IRISA mène des recherches dans le domaine de l'informatique et des nouvelles technologies de l'information. Il constitue un pôle de recherche d'excellence avec des priorités scientifiques telles que la bio-informatique, la sécurité des systèmes, les nouvelles architectures logicielles, la réalité virtuelle, l’analyse des masses de données et l’intelligence artificielle.






Photo
20210098_0014
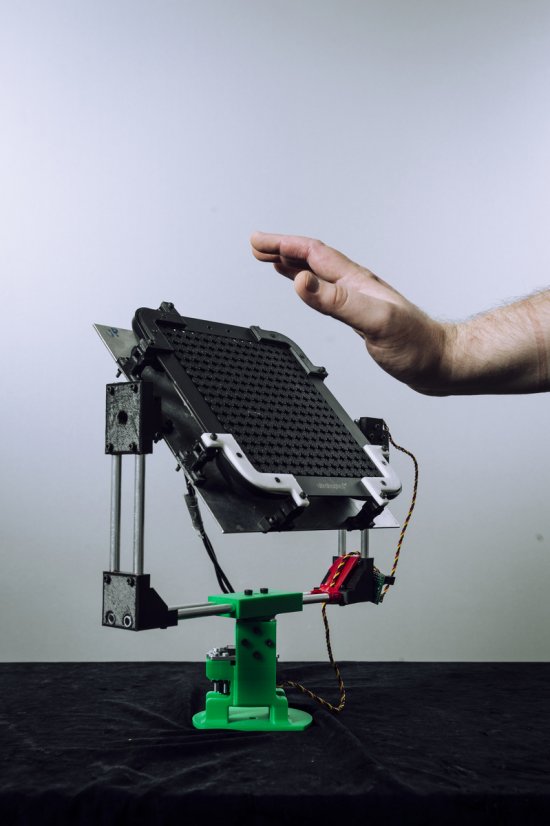
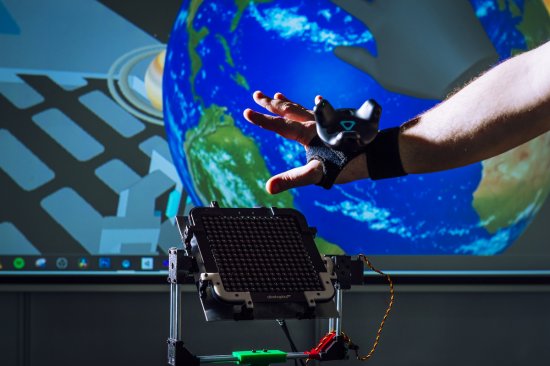
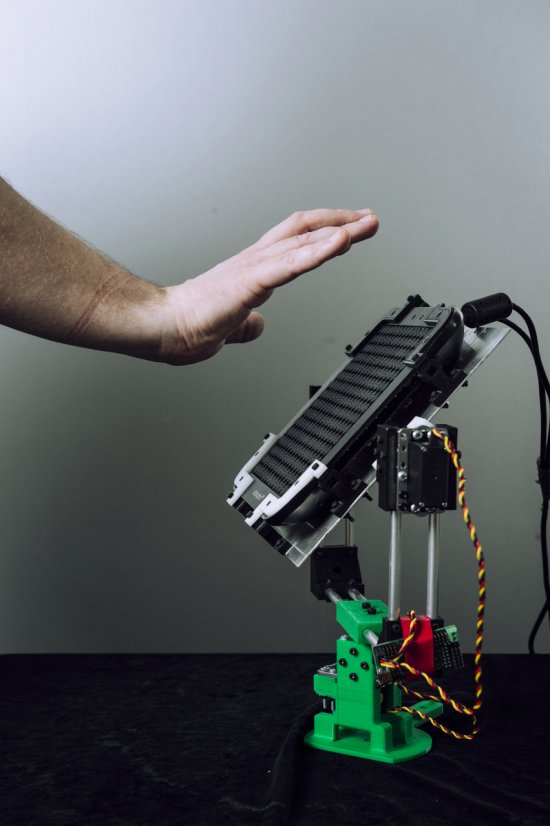
Interface haptique WeATaViX qui retranscrit le toucher dans la réalité virtuelle







Photo
20210098_0016
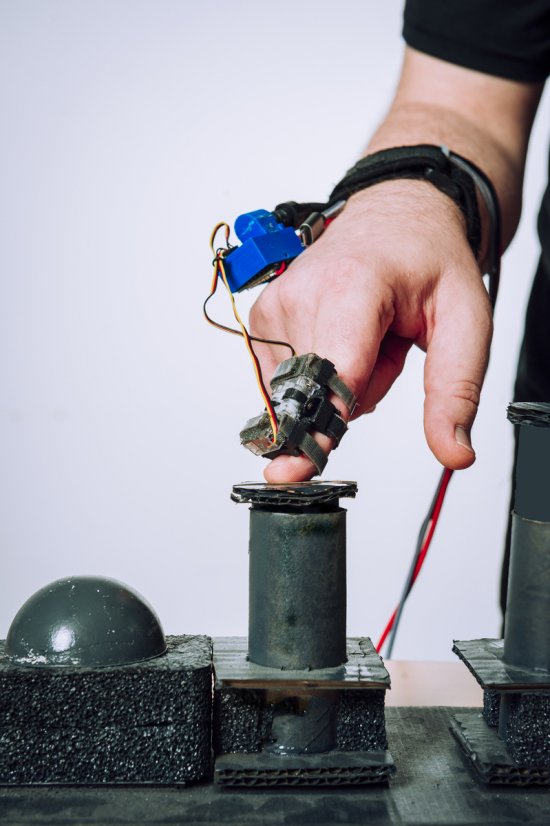
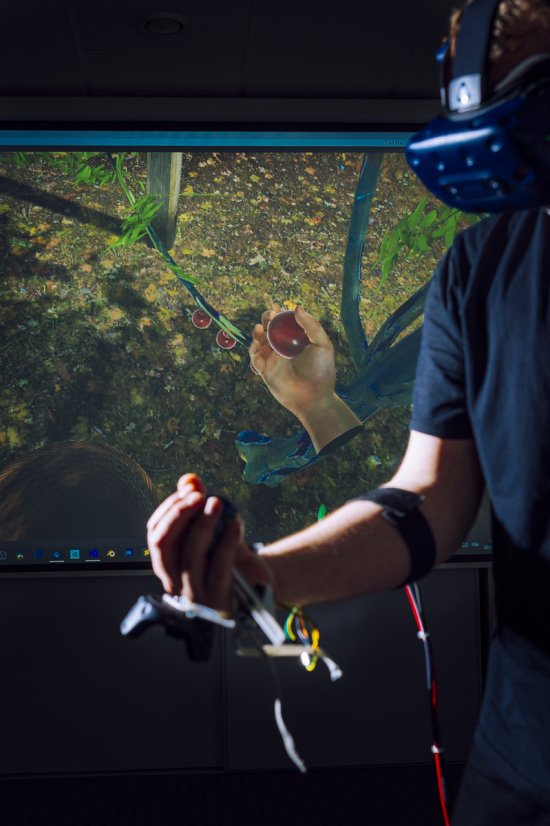
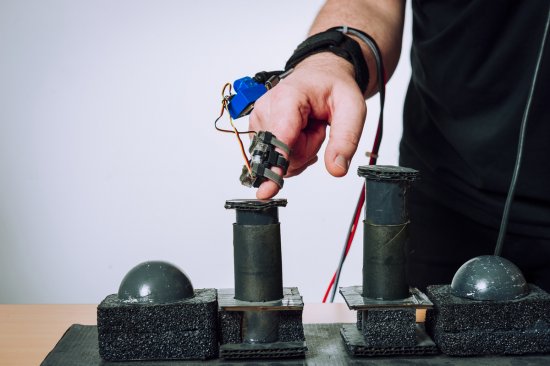
Interface haptique WeATaViX qui retranscrit le toucher dans la réalité virtuelle





Photo
20210098_0017
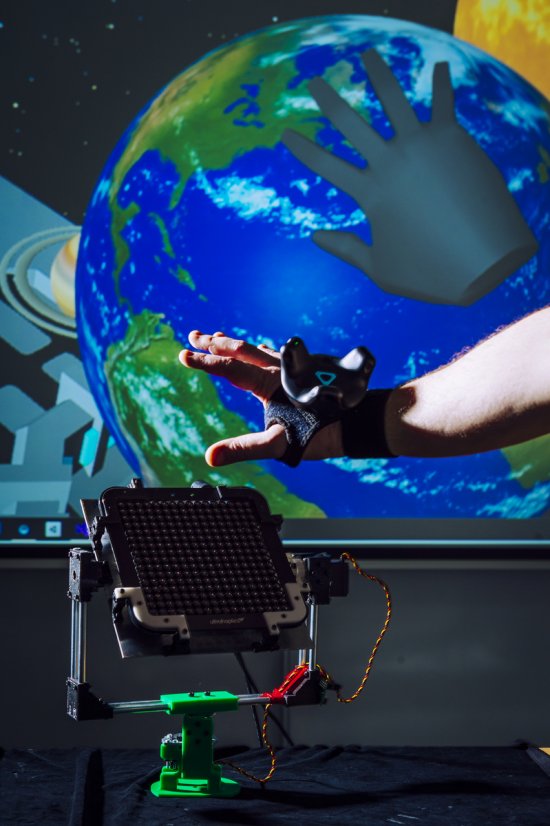
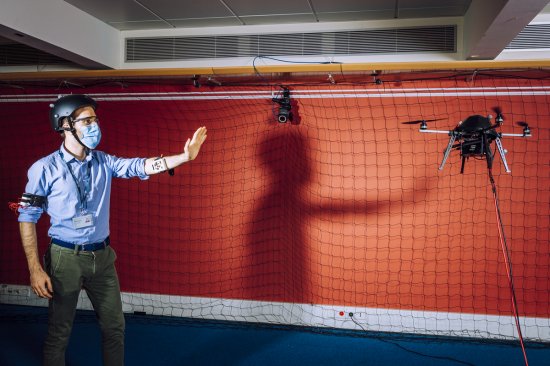
Interface haptique WeATaViX qui retranscrit le toucher dans la réalité virtuelle






Photo
20210098_0015
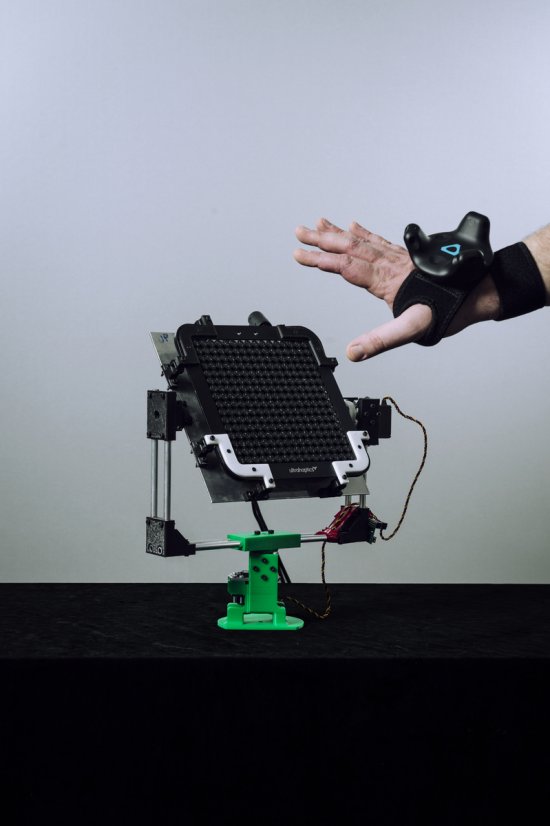
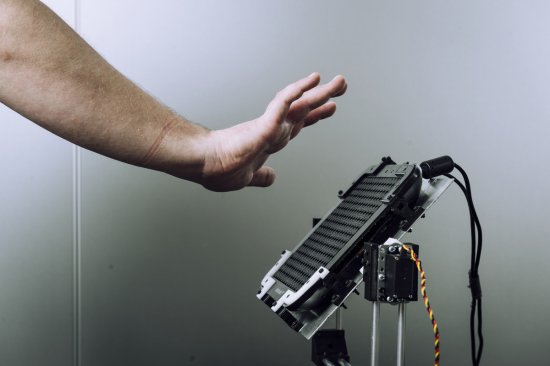
Interface haptique WeATaViX qui retranscrit le toucher dans la réalité virtuelle