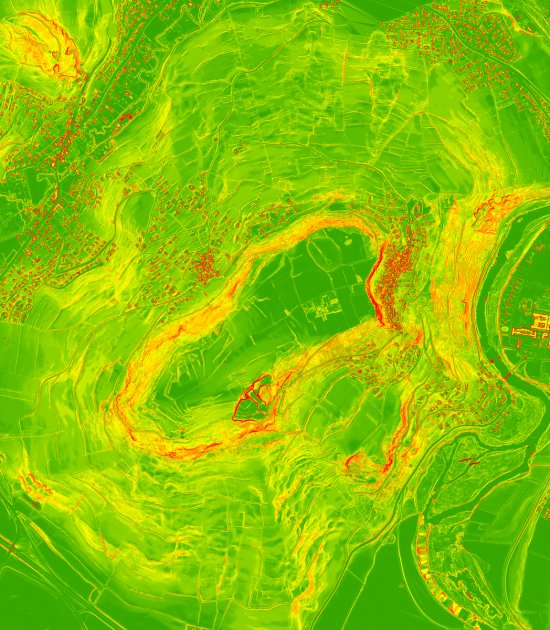
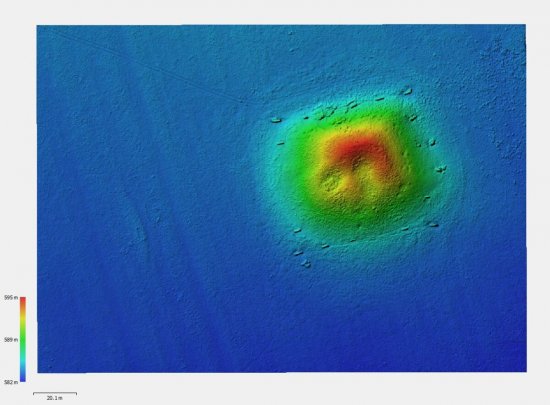
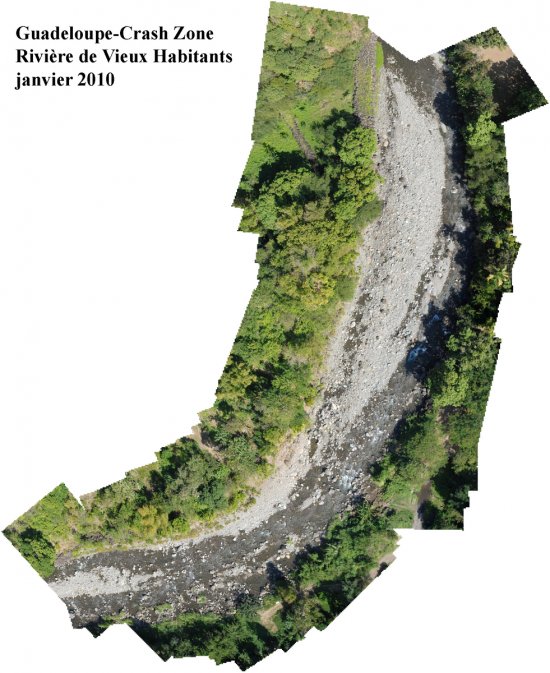
Piloting a drone to map the major landslide that occurred in 2013 near Amulet Peak, around 130 km north-east of Anchorage, Alaska.
© Cyril Frésillon / LPG / CNRS Images
Scientific news
Far from being simple toys, drones are proving to be valuable allies for scientists, in sometimes unexpected roles.
© Cyril Frésillon / LPG / CNRS Images
While our sky is sadly depopulated, year after year, of the birds and insects that swarmed there not so long ago, it now has new inhabitants. Drones are everywhere, and are used for many purposes, from the simple amateur amazed at rediscovering their garden to the police officer responsible for monitoring a riotous demonstration. But if there is one area where drones should prove valuable in the future, it is science; and to tell the truth, this is already the case, sometimes in a surprising way.
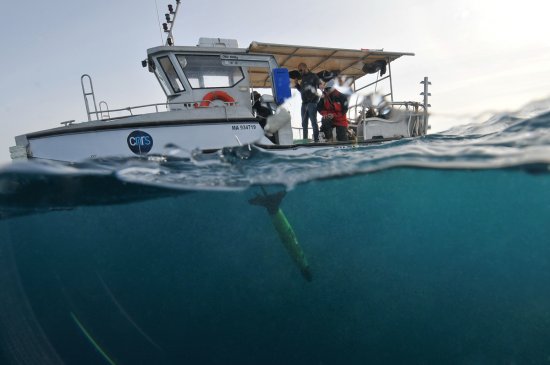
One can easily guess that because of their agility and ability to gain height, drones allow scientists to report on large-scale phenomena, without polluting or disturbing ecosystems like planes and other helicopters do. But did you know that they were also deployed around (and inside!) jewels of our heritage, to allow researchers to capture every detail and produce extremely faithful 3D models? And that's not all: we find them, for example, in the mountains, where they help prevent avalanche risks by modelling their trajectory and dynamics to better anticipate them.
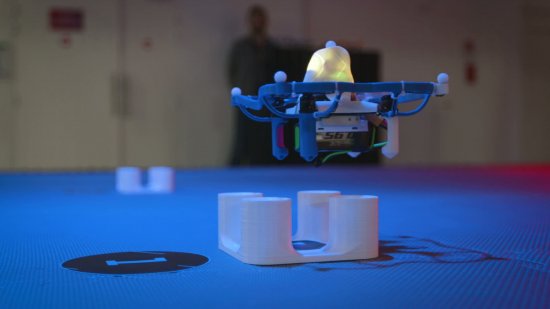
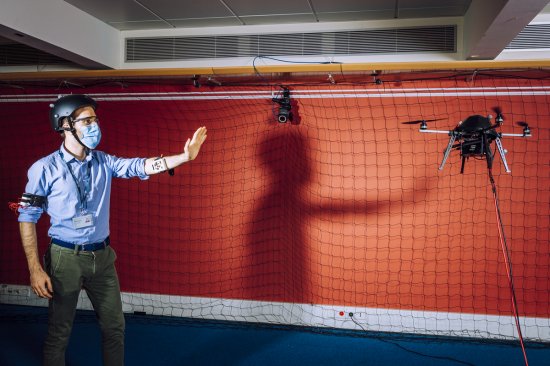
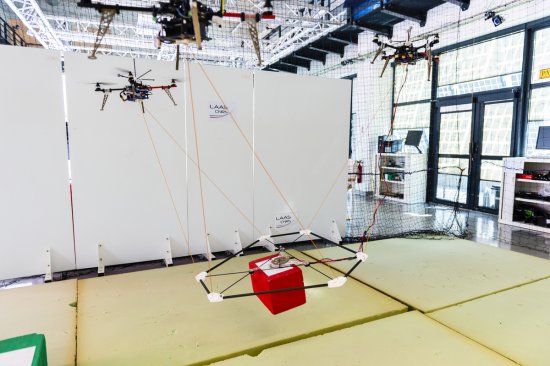
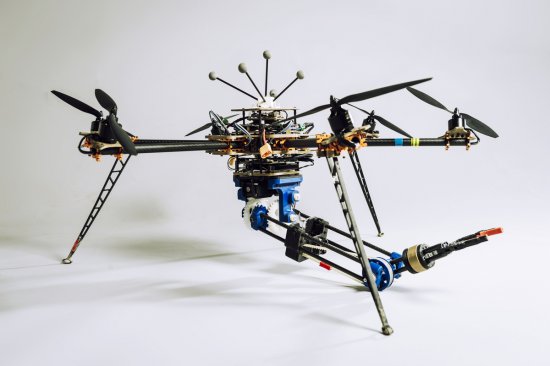
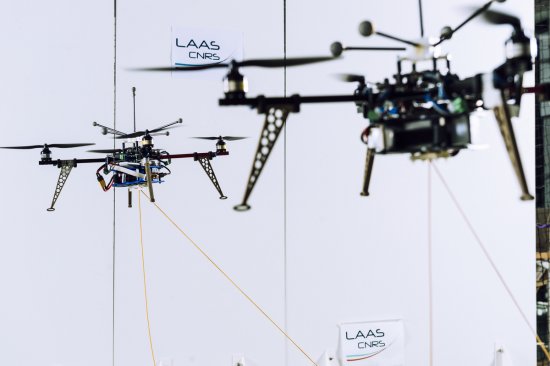
And while they serve science, the opposite is also true. Scientific teams are working hard to make them ever more autonomous, so that they can carry out multiple missions without the assistance of a pilot. Still others are busy equipping them with new capabilities, drawing inspiration from nature and animals such as birds, butterflies or bats... Finally, it's worth mentioning that for some the objective is to bring drones into the new dimension of virtual reality, in a video game context for example... But not only.
To better understand this phenomenon, we bring you a selection of photo and video reports around drones, and their present and future uses by scientists from all walks of life.
Our work is guided by the way scientists question the world around them and we translate their research into images to help people to understand the world better and to awaken their curiosity and wonderment.