Production year
2021

© Cyril FRESILLON / Irisa / CNRS Images
20210098_0035
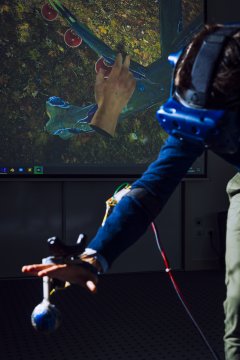
Test d’une interface haptique portable développée à l'Irisa. Le scientifique qui porte ce bracelet vibrant réalise une opération chirurgicale sur un fantôme, en manipulant à distance un bras robotisé muni d'un scalpel. Le bracelet vibre si la lame n'est pas bien positionnée. Les technologies haptiques portables de ce type sont des outils prometteurs de l’interaction humain-machine. Ils permettent de développer le travail collaboratif entre humains et robots, grâce à une communication efficace basée sur le sens du toucher plutôt que sur la parole. Ainsi l’interface peut orienter l’humain en anticipant le trajet du robot, le prévenir d’un danger imminent comme la présence d’un obstacle sur sa route, ou tout simplement signaler un changement dans le statut du robot (épuisement de la batterie) ou l’avancement de sa tâche.
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions
2021
Our work is guided by the way scientists question the world around them and we translate their research into images to help people to understand the world better and to awaken their curiosity and wonderment.