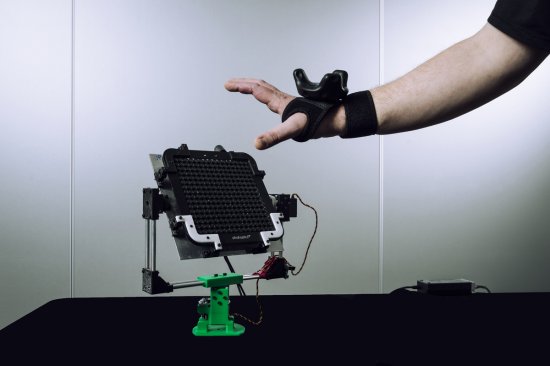







Photo
20210098_0013
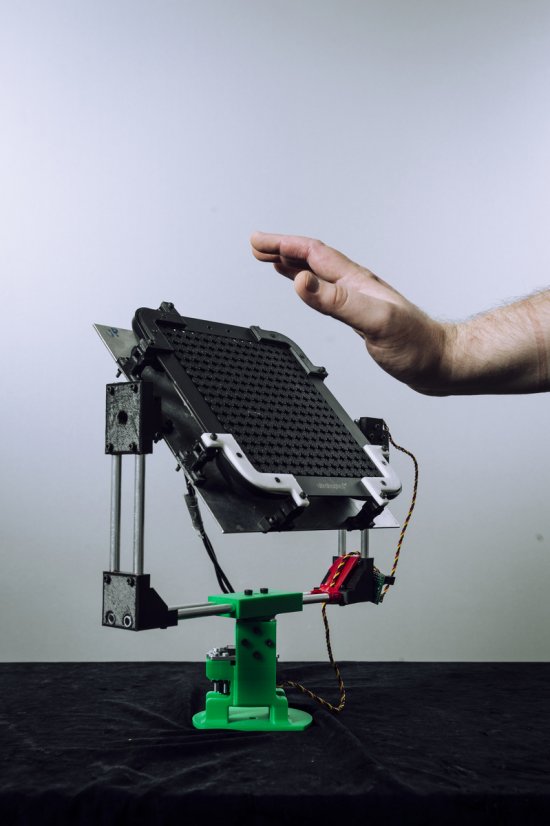
Interface haptique WeATaViX qui retranscrit le toucher dans la réalité virtuelle

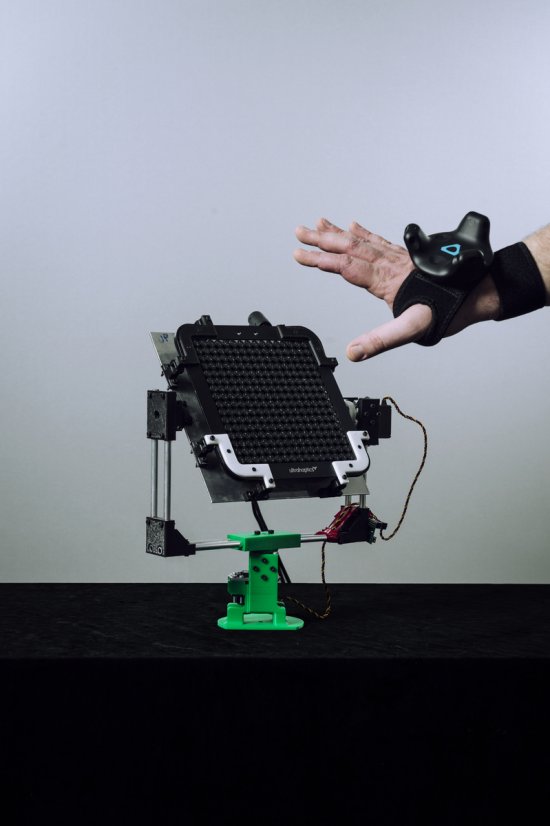
Photo
20210098_0014
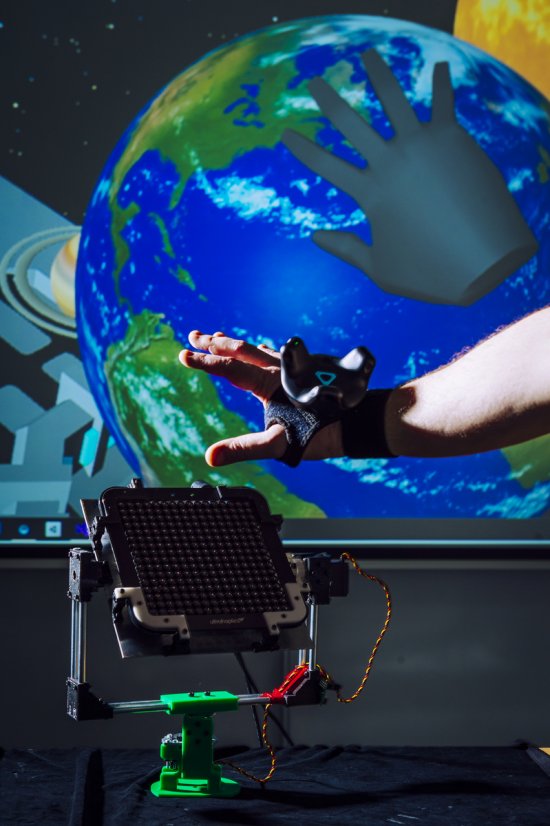
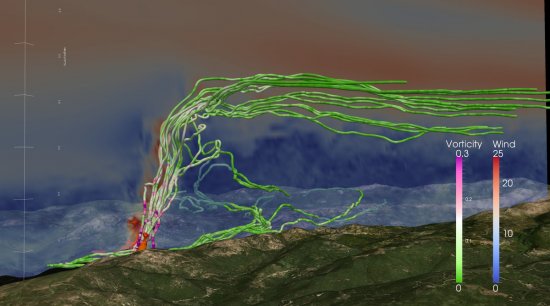
Interface haptique WeATaViX qui retranscrit le toucher dans la réalité virtuelle

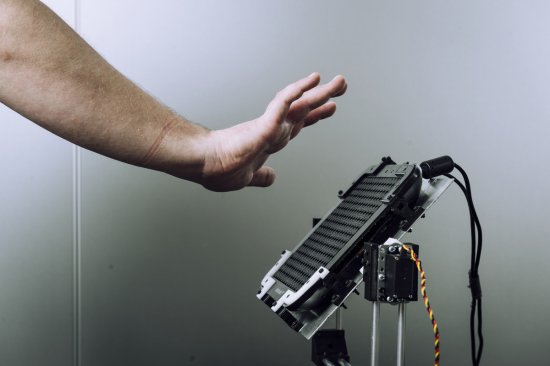
Photo
20210098_0016
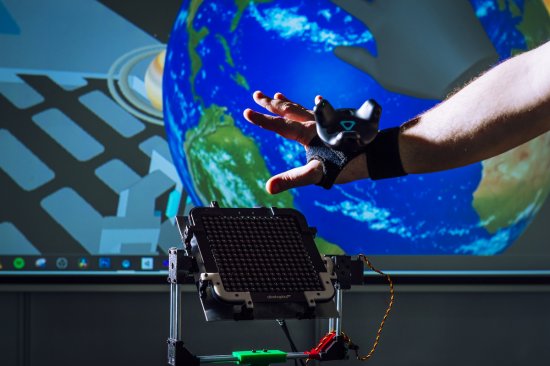
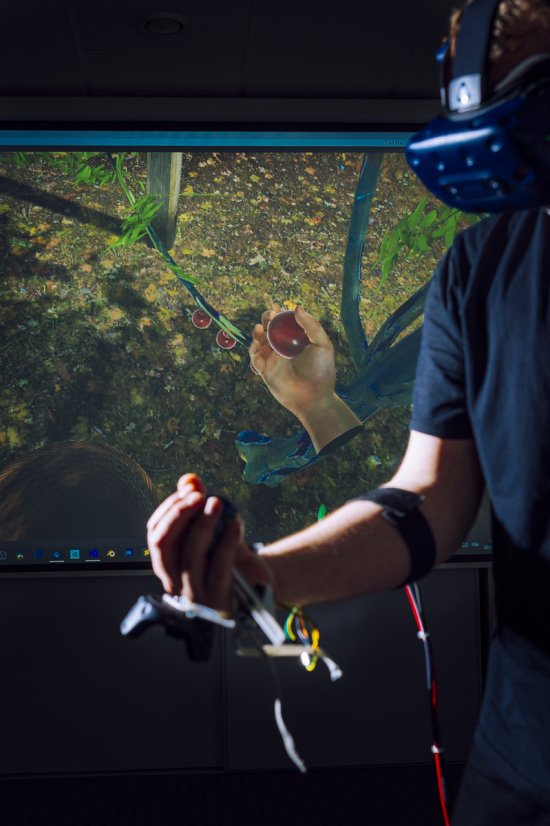
Interface haptique WeATaViX qui retranscrit le toucher dans la réalité virtuelle

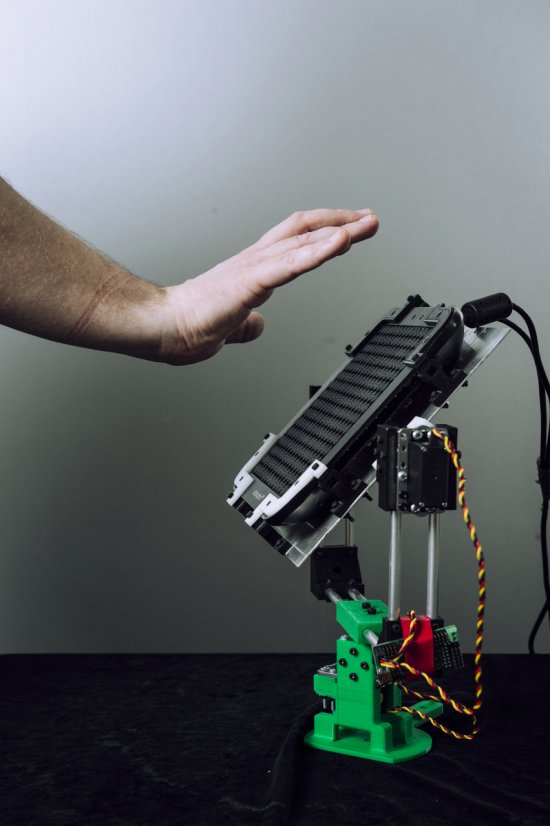
Photo
20210098_0017
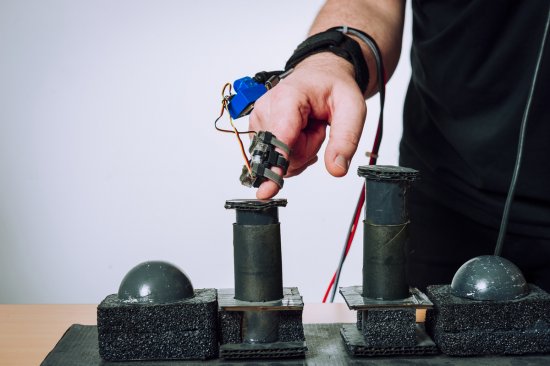
Interface haptique WeATaViX qui retranscrit le toucher dans la réalité virtuelle