Research program(s)
Production year
2020

© Cyril FRESILLON / LAAS / CNRS Images
20200084_0037
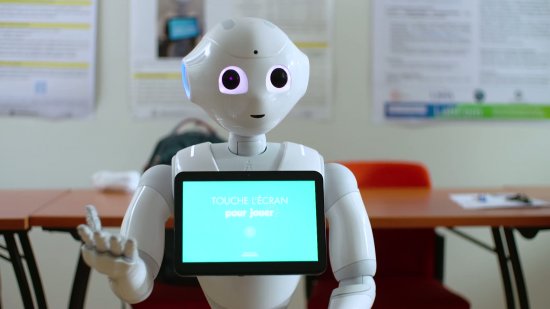
Pepper oriente un utilisateur en pointant le chemin tout en lui donnant verbalement l’itinéraire. Ce robot de service autonome a été doté de fonctionnalités de guidage inédites par le LAAS-CNRS. Si on lui demande son chemin, Pepper génère un itinéraire entre les points de départ (son interlocuteur) et d’arrivée (la destination). Il se déplace ensuite pour se positionner de manière à indiquer la destination le plus naturellement possible, en pointant à l'aide de ses membres supérieurs. Il propose également un itinéraire à l’écrit et à l’oral. Grâce à sa capacité à se projeter le long du chemin proposé, il indique les directions en fonction de la position future de son interlocuteur. Le calcul du chemin et la génération de la phrase d’itinéraire sont réalisés de manière dynamique, sans pré-programmation. Cette image a été produite dans le cadre du projet MuMMER (MultiModal Mall Entertainment Robot), dans le but de développer un robot humanoïde capable d’interagir naturellement avec le public, dans un centre commercial par exemple. Pepper est développé par la société SoftBank Robotics.
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions
2020
Our work is guided by the way scientists question the world around them and we translate their research into images to help people to understand the world better and to awaken their curiosity and wonderment.