Research program(s)
Production year
2020

© Cyril FRESILLON / LAAS / CNRS Images
20200084_0033
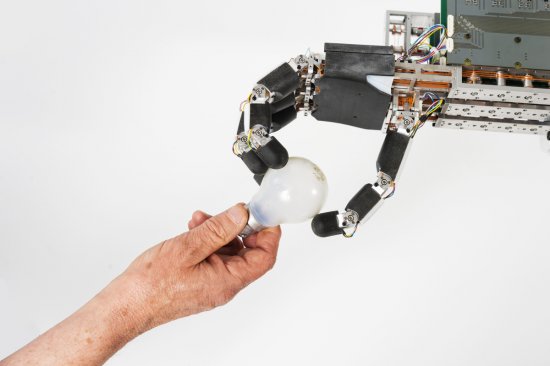
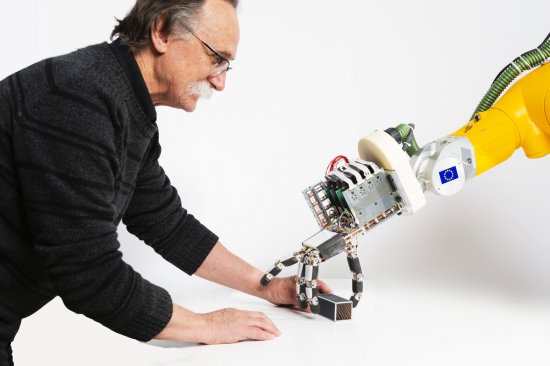
Un des deux robots de service polyvalents PR2 du LAAS-CNRS. Les dispositifs sur sa tête lui permettent de percevoir son environnement : deux caméras stéréos, chacune avec un champ de vue différents, et un dispositif de capture optique de mouvement. Il peut saisir et manipuler des objets grâce à un gripper (dispositif de préhension) muni de capteurs de pression. Au LAAS-CNRS, ce robot est utilisé dans le cadre de recherches sur l’interaction humain-machine. L’objectif est de lui permettre de réaliser une tâche avec une personne. Cela nécessite de pourvoir PR2 de capacités de compréhension et d'adaptation à l’humain, de raisonnement, de communication, etc. Dans cette optique, le LAAS-CNRS développe des composants logiciels à différents niveaux dans l'architecture robotique (perception, planification de mouvement, navigation, planification de tâches, mémoire à long terme, supervision, etc.). PR2 est développé par l’université de Berkeley et la société Willow Garage.
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions
2020
Our work is guided by the way scientists question the world around them and we translate their research into images to help people to understand the world better and to awaken their curiosity and wonderment.