Research program(s)
Production year
2024

© Cyril FRESILLON / LS2N / CNRS Images
20240049_0004
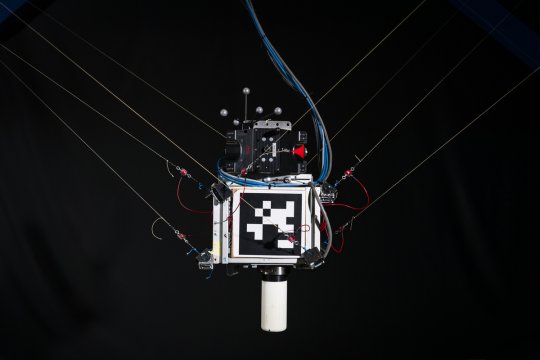
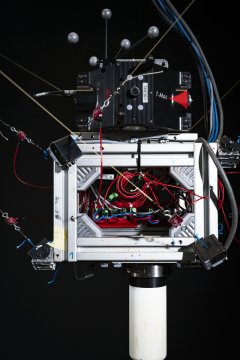
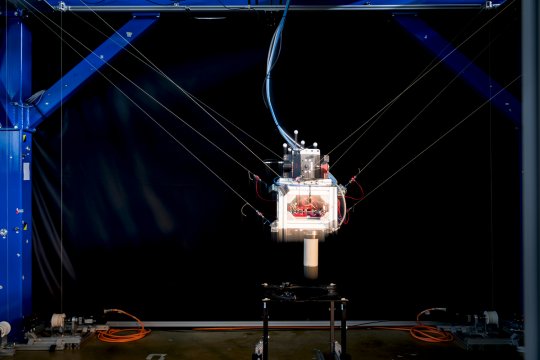
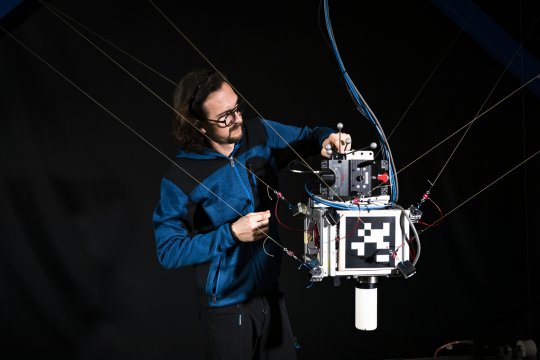
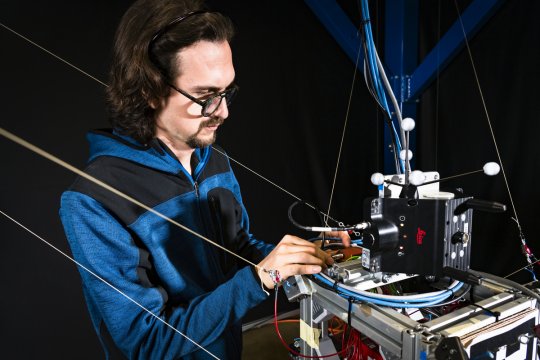
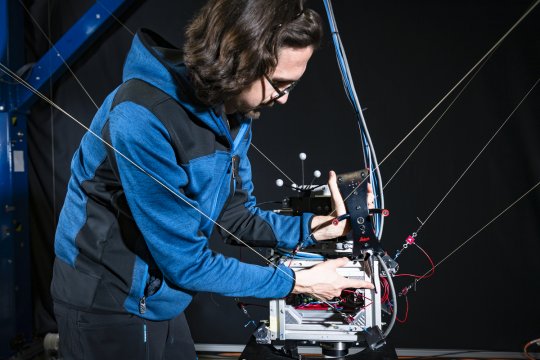
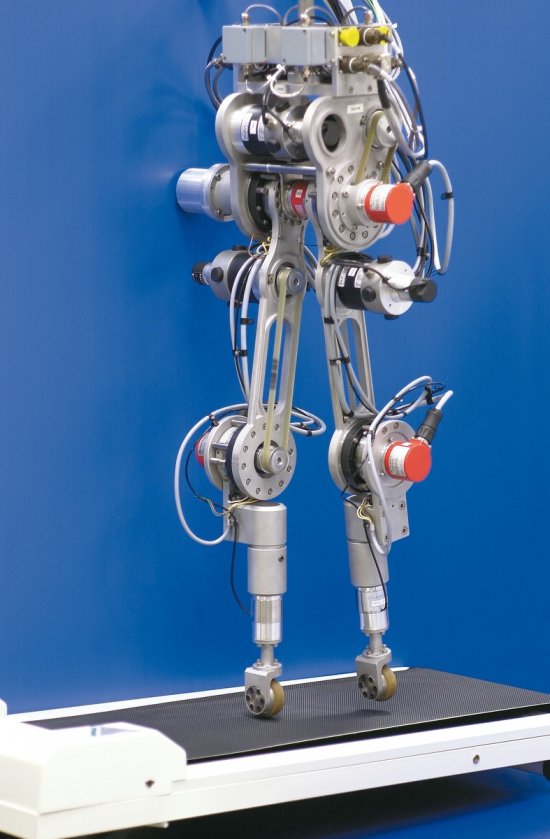
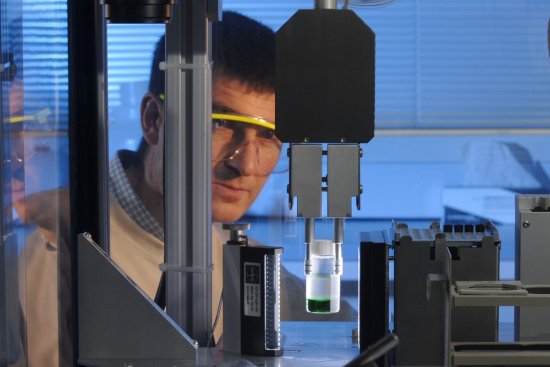
Etude du mouvement d'un robot collaboratif (cobot) parallèle à câbles. Un robot parallèle à câbles (RPC) est un robot dont la plateforme mobile se déplace dans l'espace au moyen de câbles actionnés par des enrouleurs motorisés, ce qui lui permet de manipuler des pièces de taille et de masse conséquentes dans de grands espaces. Les RPC collaboratifs sont aussi capables d'interagir avec des opérateurs humains pour répondre à de nombreux besoins industriels. Pour rendre ces robots performants et sûrs, les scientifiques développent des solutions technologiques et des stratégies de commande. Ils travaillent aussi sur le développement d'interfaces humain-robot pour améliorer leur acceptabilité et performances mécaniques. Pour cela, ils étudient les mouvements des robots via des modèles mathématiques, ainsi que les propriétés de leurs composants, notamment les câbles. En combinant des capteurs proprioceptifs, qui permettent aux robots de percevoir leur environnement et d’anticiper les collisions, et de lois de commande, les RPC peuvent à présent atteindre une précision suffisante pour répondre à des besoins industriels tout en garantissant la sécurité des opérateurs.
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions
2024
Our work is guided by the way scientists question the world around them and we translate their research into images to help people to understand the world better and to awaken their curiosity and wonderment.