Programme(s)
Année de production
2023

© Cyril FRESILLON / INCIA / CNRS Images
20230098_0024
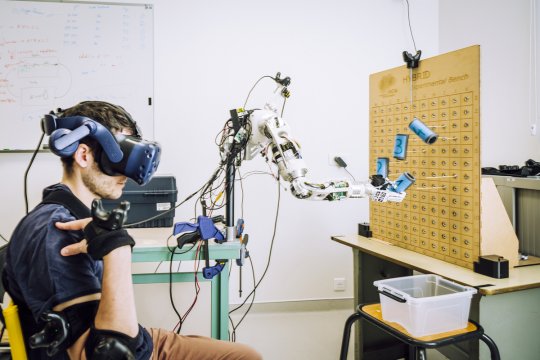
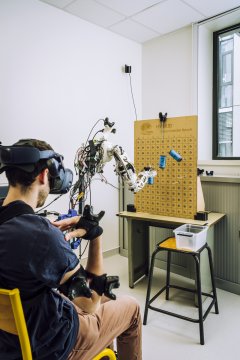
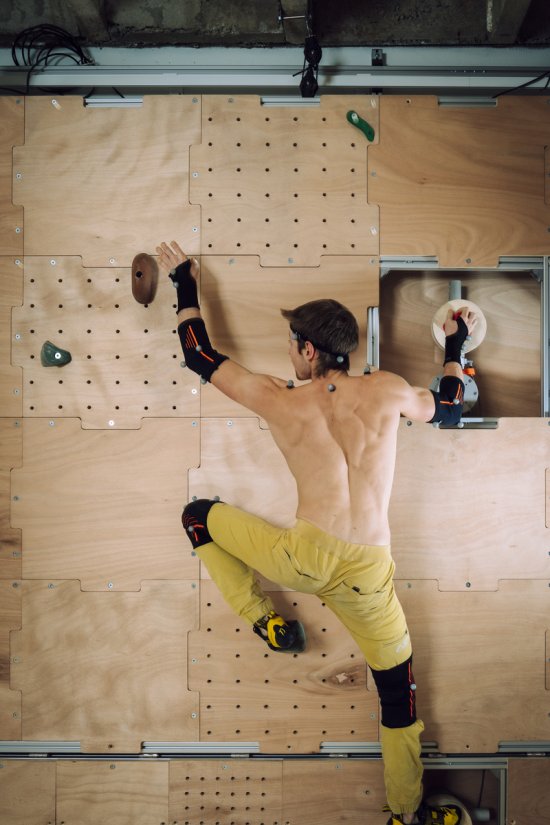
Manipulation d’objets à l’aide du bras robotique Reachy par une personne non amputée simulant un handicap, dans le cadre d’une recherche visant à améliorer le contrôle des prothèses de bras. L’opérateur pilote le robot grâce à la réalité virtuelle, qui lui permet de voir à travers les yeux de Reachy et de contrôler son point de vue (visible sur l’écran au premier plan) en bougeant sa propre tête, et d’une intelligence artificielle. Cette dernière contrôle les articulations du bras robotique sur la base des mouvements de l’épaule et du torse de l’opérateur ainsi que du contexte (position et orientation de l’objet à saisir). Elle permet de reconstruire le mouvement naturel des articulations manquantes chez une personne amputée au-dessus du coude et pourrait, à terme, être utilisée sur les prothèses de bras. Ce type de contrôle des articulations de la prothèse, basé sur les mouvements résiduels, serait plus naturel et intuitif que celui des prothèses myoélectriques (contrôlées via les contractions des muscles restants) utilisées actuellement.
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales
2023
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.