© LIRMM/CNRS Images
Référence
20030001_0901
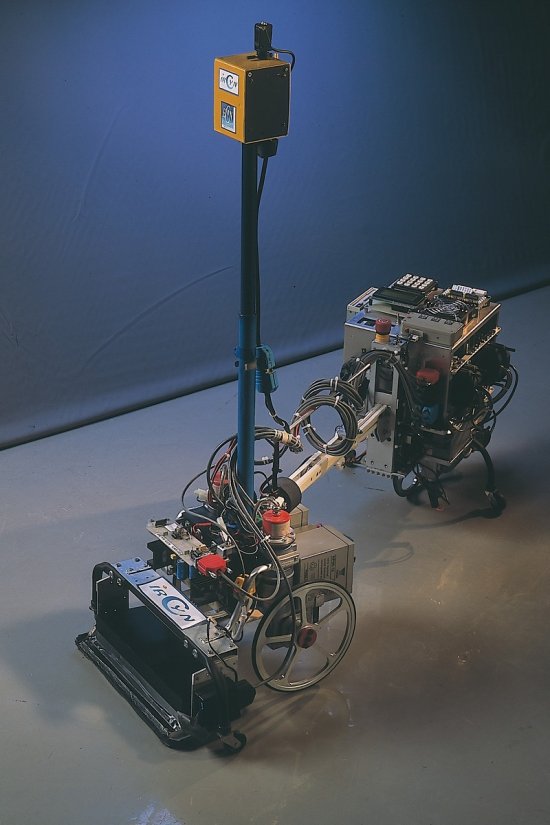
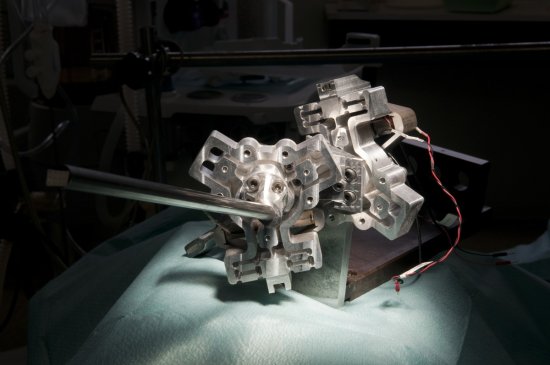
Le robot OMNI est un robot omnidirectionnel à trois roues décentrées orientables entièrement motoris
Le robot OMNI est un robot omnidirectionnel à trois roues décentrées orientables entièrement motorisées. Chacune d'entre-elle est équipée d'un moteur pilotant son axe de direction et d'un autre pilotant son axe de traction. Il est équipé de codeurs incrémentaux (axes de traction) et absolus (axes de direction), ainsi que d'un gyromètre optique pour l'odométrie (mesure des distances parcourues). Il est aussi muni de capteurs extéroceptifs : goniomètre laser, télémètre laser à balayage horizontal, caméra pour la localisation absolue. Dimensions : L = 860 mm, l = 725mm, h = 760 mm. Poids = 325kg.
Ajouter à ma sélection
Conditions d'utilisation
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales