© Thierry SIMEON/CNRS Images
Référence
19950001_0636
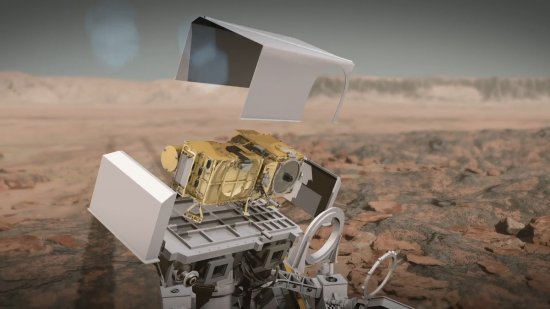
Synthèse numérique d'une trajectoire calculé en combinant des critères de contraintes de non collis
Synthèse numérique d'une trajectoire calculé en combinant des critères de contraintes de non collision du chassis avec le terrain, de stabilité et de faisabilité cinématique, afin d'exploiter au mieux les capacités de navigation autonome des robots mobiles (d'exploration planétaire Adam) en environnements naturels et accidentés. (Réf. Le Journal du CNRS Juin 95).
Ajouter à ma sélection
Conditions d'utilisation
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales