© Thierry SIMEON/CNRS Images
Reference
19950001_0636
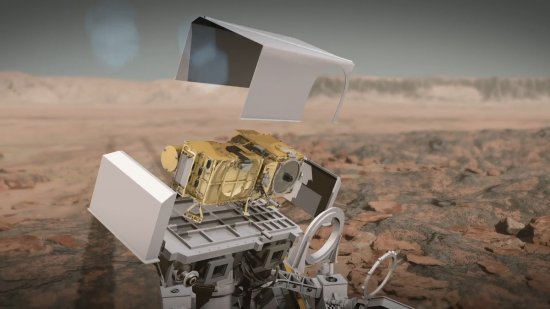
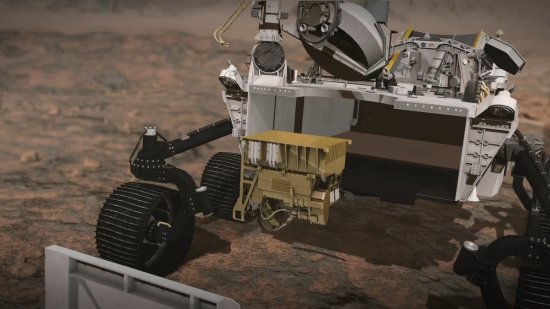
Synthèse numérique d'une trajectoire calculé en combinant des critères de contraintes de non collis
Synthèse numérique d'une trajectoire calculé en combinant des critères de contraintes de non collision du chassis avec le terrain, de stabilité et de faisabilité cinématique, afin d'exploiter au mieux les capacités de navigation autonome des robots mobiles (d'exploration planétaire Adam) en environnements naturels et accidentés. (Réf. Le Journal du CNRS Juin 95).
Add to my selection
Terms of use
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions