Programme(s)
Année de production
2013

© Cyril FRÉSILLON / ISIR / CNRS Images
20140001_0015
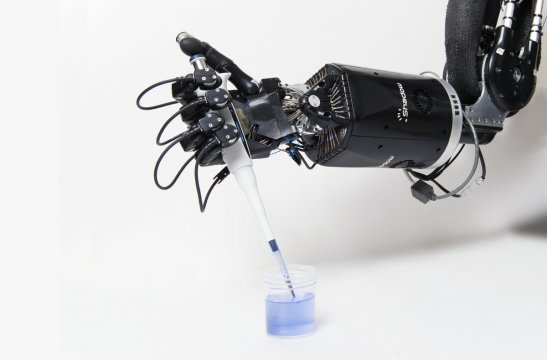
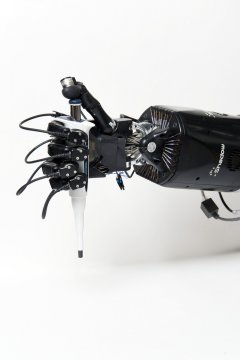
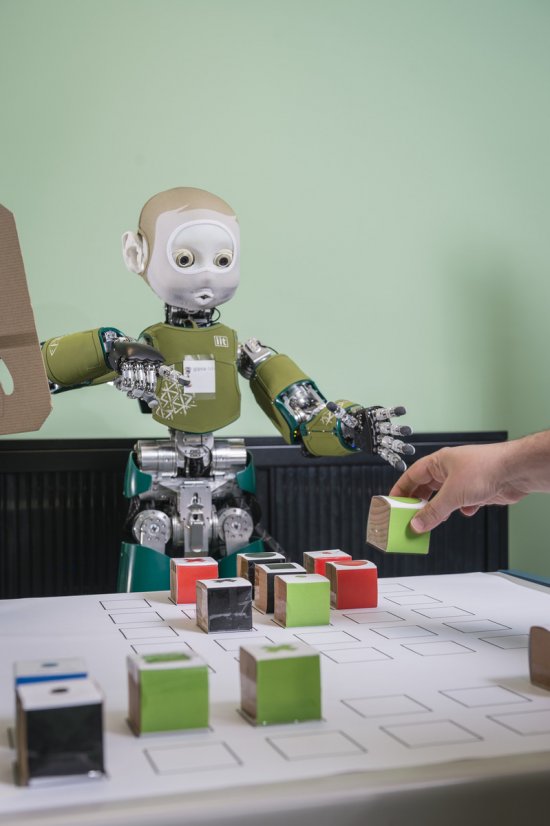
Manipulation d'une pipette par une main robotisée à caractère anthropomorphique. La saisie est réalisée à deux doigts par le côté et elle est conditionnée par le support sur lequel repose la pipette. La main robotisée est destinée à la manipulation dextre d'objets de la vie courante, à l'image du geste naturel de la main humaine. Chaque bout de doigt est équipé d'un capteur de forces 6 axes pour récupérer des informations sur l'interaction entre la main et l'objet. La main est associée à un bras à muscles robotisé permettant les phases d'approche et de saisie des objets. Cette plateforme est mise en place dans le cadre du projet européen Handle, pour reproduire les mécanismes à l'œuvre dans la préhension et la manipulation humaine. Les chercheurs développent la dextérité, l'autonomie et l'intelligence de cette main.
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales
2013
Nous mettons en images les recherches scientifiques pour contribuer à une meilleure compréhension du monde, éveiller la curiosité et susciter l'émerveillement de tous.