Research program(s)
Production year
2020

© Cyril FRESILLON / LAAS / CNRS Images
20200084_0051
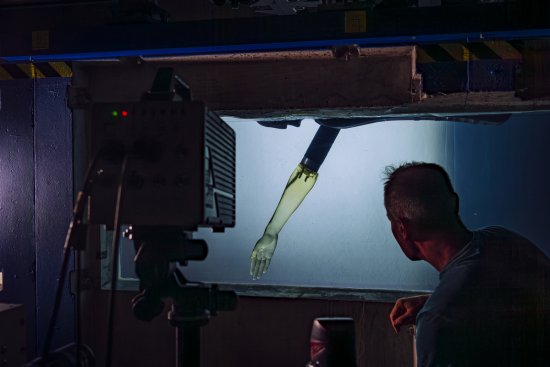
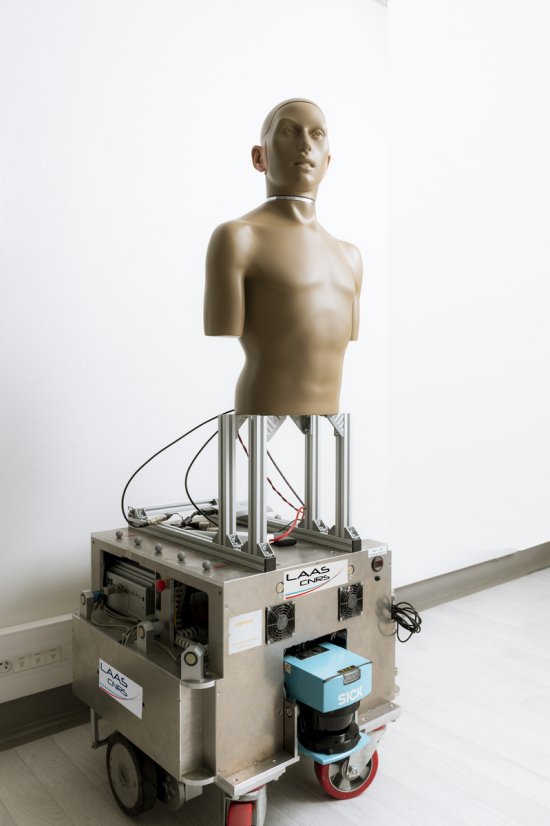
Tête du mannequin anthropomorphe pour simulation acoustique KEMAR monté sur le robot Two!Ears. Ce robot mobile est capable de réaliser la localisation binaurale (sur la base de deux oreilles) horizontale de sources sonores. Il a été développé par le LAAS-CNRS dans le cadre du projet européen de psychoacoustique du même nom, dont l’objectif est de caractériser la perception humaine dans sa dimension active, exploratoire. Two!Ears se déplace et bouge la tête afin de repérer une source sonore, reproduisant ainsi le fonctionnement de l’être humain, qui combine la perception du son et le mouvement du corps. Lorsque l’on analyse une scène auditive, on a en effet tendance à bouger parce qu’il est plus efficace de placer la source sonore à l’intérieur du périmètre où l’on est plus sensible à l’origine spatiale du son, et à se rapprocher de la source afin de la localiser.
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions
2020
Our work is guided by the way scientists question the world around them and we translate their research into images to help people to understand the world better and to awaken their curiosity and wonderment.