Production year
2017

© Jean-Claude MOSCHETTI / HEUDIASYC / CNRS Images
20170123_0005
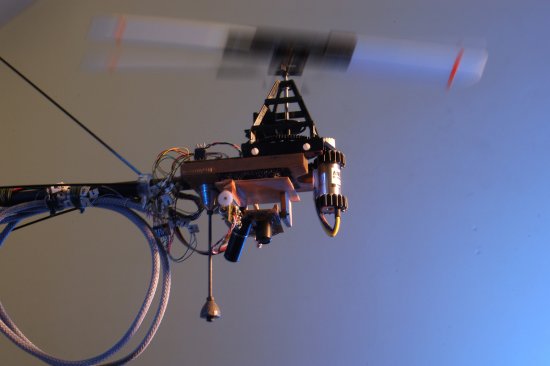
Drone octorotor Modul Air suivant de manière autonome un AprilTag placé sur un autre drone. Ce vol autonome est contrôlé par un système de stabilisation par flux optique (pour les mouvements latéraux), d'une caméra fixant l’AprilTag, de capteurs inertiels et d'altitude permettant ainsi au drone de gérer seul ses déplacements en suivant la cible. Par ailleurs, ce drone peut supporter une charge utile allant jusqu'à 1,100kg. Il a également la particularité d'être composé de huit hélices, et donc de huit moteurs. Ceci lui permet d'être soumis à des tests de tolérance aux fautes. En effet, la redondance des hélices, certaines étant « superflues », évite au drone d'être perturbé par des pannes moteurs. Il peut ainsi voler avec seulement quatre hélices. Le système détecte les défaillances en comparant les mesures inertielles avec une estimation de l’état du drone. Si l’erreur entre les deux est trop importante, un moteur est déclaré défaillant. Le rétablissement du système se fait par changement d'algorithme de multiplexage
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions
2017
Our work is guided by the way scientists question the world around them and we translate their research into images to help people to understand the world better and to awaken their curiosity and wonderment.