Production year
2017

© Jean-Claude MOSCHETTI / HEUDIASYC / CNRS Images
20170123_0028
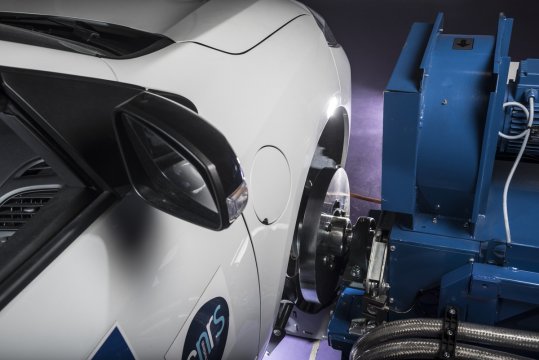
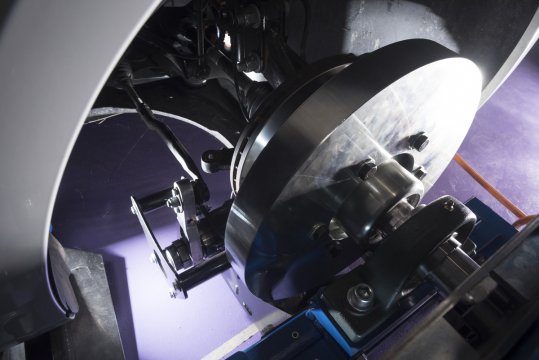
Banc de contrôle permettant de superviser la conduite d'une voiture autonome sur banc VILAD ("Vehicle in the Loop for Autonomous Driving"). Le logiciel Scanner studio (Oktal) reproduit la dynamique du véhicule et fournit les données des capteurs. Le banc VILAD, conçu sur mesure par les chercheurs du laboratoire Heudiasyc, permet de tester des algorithmes de conduite en toute sécurité et en conditions semi-réelles sur des véhicules robots et autonomes. Le banc est composé d'un moteur électrique relié à la crémaillère agissant à son tour sur le volant. Les simulations de heurts sont ainsi suivies d'un retour de force dans le volant. D'autre part, quatre autres moteurs électriques asynchrones (de couleur bleue) liés aux quatre roues (aux moyeux) de la voiture ont pour effet de contrer la force motrice de la voiture et de simuler la route, dont, par exemple, les côtes et les descentes. L'inertie liée au freinage est également reproduite. Des capteurs virtuels, simulés dans le logiciel envoient les données aux API qui les transmettent par réseau à l'ordinateur embarqué de la voiture. La plateforme fonctionne en boucle ouverte : les 5 moteurs électriques forment la liaison entre le banc de contrôle et la voiture. Après avoir effectué les tests nécessaires, l'objectif est de tester les algorithmes pour véhicule autonome sur piste réelle voire sur route réelle.
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions
2017
Our work is guided by the way scientists question the world around them and we translate their research into images to help people to understand the world better and to awaken their curiosity and wonderment.