Research program(s)
Production year
2012

© Cyril FRESILLON/CNRS Images
20120001_0732
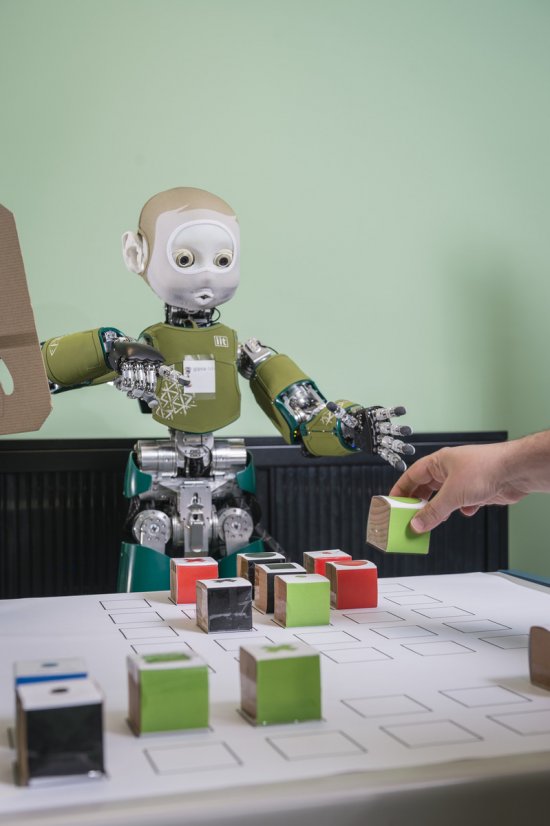
Collaboration homme-robot : manipulation interactive d'objets. Le robot compagnon Jido équipé d'un bras Kuka LWR saisit un gobelet. Ce robot a la capacité de conduire une tâche collaborative. Il est capable d'estimer l'accessibilité des objets par lui-même et par l'homme en effectuant une prise de perspective. Puis, il peut calculer et réaliser des plans partagés ("shared plans") dans lesquels l'homme peut être mis à contribution si nécessaire. Cette recherche en robotique est menée dans le bâtiment Adream, Architectures dynamiques reconfigurables pour systèmes embarqués autonomes mobiles.
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions
2012
Our work is guided by the way scientists question the world around them and we translate their research into images to help people to understand the world better and to awaken their curiosity and wonderment.