Production year
2009

© Benoît RAJAU/ISIR/CNRS Images
20090001_0874
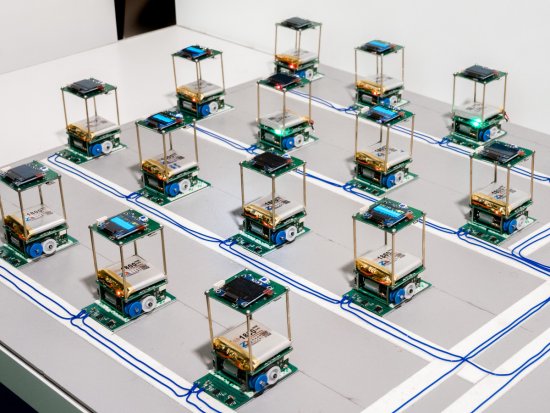
Le robot Hylos 2 est un véhicule autonome tout-terrain composé de 4 pattes-roues. Chaque patte a 2 liaisons pivots à axes parallèles actionnées par deux vérins électriques et supporte à son extrémité une roue directrice et motrice. Ce système à 16 degrés de liberté se déplace en combinant traction des roues et mouvements internes de la structure, lui conférant ainsi une grande capacité d'adaptation et de franchissement d'obstacles sur des sols accidentés (optimisation de la stabilité). Les applications concernent l'exploration planétaire ou volcanique pour des tâches de type mesure d'observation scientifique.
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions
2009
Our work is guided by the way scientists question the world around them and we translate their research into images to help people to understand the world better and to awaken their curiosity and wonderment.