Research program(s)
Production year
2013

© Cyril FRÉSILLON / ISIR / CNRS Images
20140001_0029
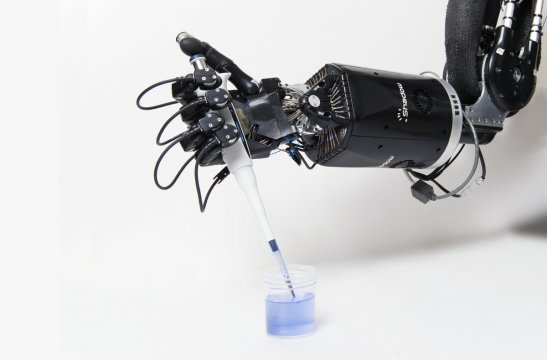
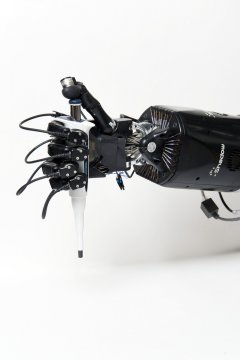
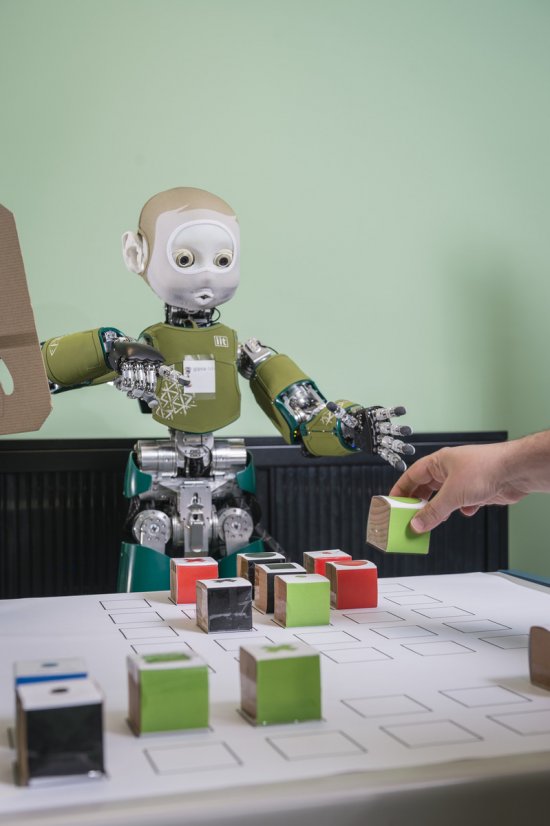
Doigt d'une main robotisée à caractère anthropomorphique, au bout duquel une pression est exercée par le bout d'un doigt humain. Des capteurs de forces 6 axes, placés au bout du doigt robotisé, fournissent des informations sur le point de contact, la pression exercée et l'orientation de cette pression. La main robotisée est utilisée pour la manipulation dextre d'objets de la vie courante, à l'image du geste naturel de la main humaine. Elle est associée à un bras à muscles robotisé permettant les phases d'approche et de saisie des objets. Cette plateforme est mise en place dans le cadre du projet européen Handle pour reproduire les mécanismes à l'œuvre dans la préhension et la manipulation humaine. Les chercheurs développent la dextérité, l'autonomie et l'intelligence de cette main robotisée.
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions
2013
Our work is guided by the way scientists question the world around them and we translate their research into images to help people to understand the world better and to awaken their curiosity and wonderment.