© Michael GAUTHIER/Patrick ROUGEOT/CNRS Images
Reference
20030001_0757
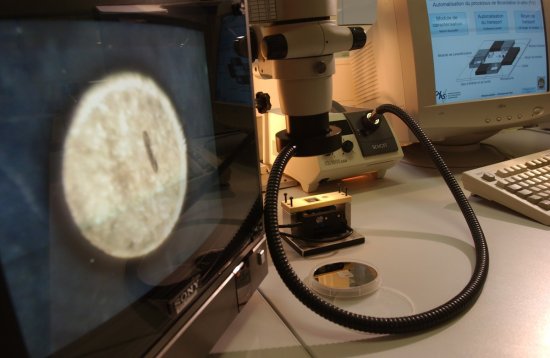
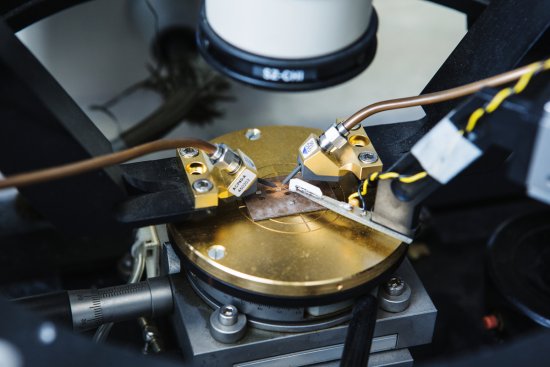
Plateforme de micromanipulation de cellules. Ce système de microrobot mobile micrométrique peut évol
Plateforme de micromanipulation de cellules. Ce système de microrobot mobile micrométrique peut évoluer dans un milieu aqueux emprisonné entre deux lamelles de verre telles que les lamelles utilisées pour des observations au microscope. Ce microrobot est un "pousseur" ferromagnétique capable de s'approcher de cellules biologiques et d'exercer sur ces dernières un effort contrôlé et quantifiable. L'avantage de cette approche est qu'elle n'est pas invasive (il n'y a pas de perturbations du milieu biologique), qu'elle ne nécessite aucune alimentation du microrobot lui-même (problème particulièrement ardu à l'échelle micrométrique) et qu'elle peut facilement s'adapter sur des microscopes existants. Les applications visées sont la préhension, l'immobilisation, le déplacement et le tri de cellules.
Add to my selection
Terms of use
The use of media visible on the CNRS Images Platform can be granted on request. Any reproduction or representation is forbidden without prior authorization from CNRS Images (except for resources under Creative Commons license).
No modification of an image may be made without the prior consent of CNRS Images.
No use of an image for advertising purposes or distribution to a third party may be made without the prior agreement of CNRS Images.
For more information, please consult our general conditions