© Michael GAUTHIER/Patrick ROUGEOT/CNRS Images
Référence
20030001_0757
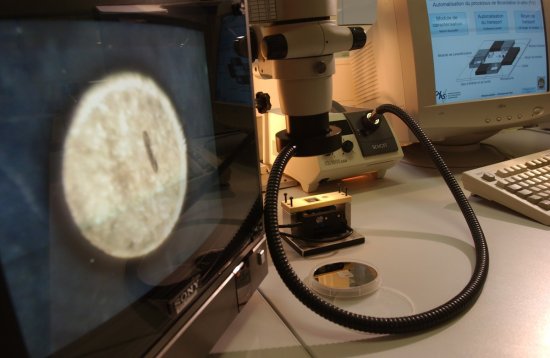
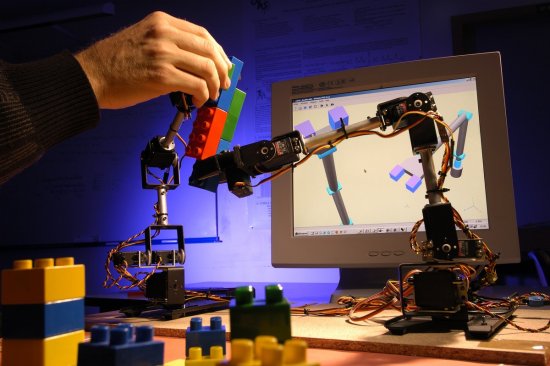
Plateforme de micromanipulation de cellules. Ce système de microrobot mobile micrométrique peut évol
Plateforme de micromanipulation de cellules. Ce système de microrobot mobile micrométrique peut évoluer dans un milieu aqueux emprisonné entre deux lamelles de verre telles que les lamelles utilisées pour des observations au microscope. Ce microrobot est un "pousseur" ferromagnétique capable de s'approcher de cellules biologiques et d'exercer sur ces dernières un effort contrôlé et quantifiable. L'avantage de cette approche est qu'elle n'est pas invasive (il n'y a pas de perturbations du milieu biologique), qu'elle ne nécessite aucune alimentation du microrobot lui-même (problème particulièrement ardu à l'échelle micrométrique) et qu'elle peut facilement s'adapter sur des microscopes existants. Les applications visées sont la préhension, l'immobilisation, le déplacement et le tri de cellules.
Ajouter à ma sélection
Conditions d'utilisation
L’utilisation des médias visibles sur la Plateforme CNRS Images peut être accordée sur demande. Toute reproduction ou représentation est interdite sans l'autorisation préalable de CNRS Images (sauf pour les ressources sous licence Creative Commons).
Aucune modification d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Aucune utilisation à des fins publicitaires ou diffusion à un tiers d'une image ne peut être effectuée sans l'accord préalable de CNRS Images.
Pour plus de précisions consulter Nos conditions générales